Waterborne AGVs for Inter Terminal Transport
Research Overview of Huarong Zheng
The usage of AGVs will pay off for environments with repeating transportation patterns. Inter Terminal Transport (ITT) is one of the typical transhipment systems for which AGVs can take care of the transport of products between the various terminals frequently. A new and innovative ITT mode--waterborne AGVs- is proposed in this study. A waterborne AGV is a guided Unmanned Surface Vessel (USV) especially used in the port area for ITT to be coordinated with the landside automated equipment to constitute a closed automated transport mode for a smart port.
Background and Research Problems
Large ports like the Port of Rotterdam are always looking for cost effective, sustainable, safe and innovative designs to operate the port more efficiently and more environmentally friendly. However, fiercer competition in North Europe with considerable capacity expansion in the container sector is foreseen. Consequently, there will be an increasing need for container transport not only inside a terminal, but also between various terminals via various modalities (rail, road, barge) in a port area, which is also known as ITT.
This kind of new automated vehicle system is expected to be beneficial for ITT. Better control performance with more advanced and effective control algorithms for individual underactuated marine surface vessel and further, vessel formation is required; at the same time, optimal trajectory generation and guidance technologies especially in port area should be able to guide the unmanned vehicles.
Research Goal
This PhD project aims to develop advanced control algorithms that can improve the autonomy of underactuated marine surface vessels. As application domain for testing out the proposed algorithms, we will consider ITT. ITT tasks put forward requirements on safety, time constraints (minimum non-performance), minimum cost and emissions. For multiple vessels working in cooperation for multiple tasks, coordination and optimization both in tasks and control should be guaranteed. Validation and evaluation of the effectiveness of the proposed waterborne AGV and AGV formation system for ITT, especially when operated in coordination of landside AGVs will be conducted to test system reliability and effectiveness.
Research Approach
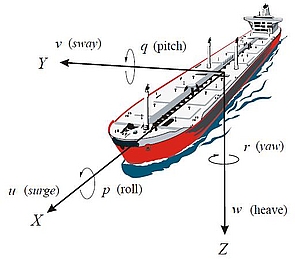
Considering features of the tracking control task and advantages of Model Predictive Control (MPC), this PhD research will undertake MPC as the control technique based on the underactuated vessel model as Figure 1 shows. MPC is based on the prediction of the future behaviour estimated by an explicit model of the system with its constraint so that it can anticipate undesirable situations in the future at an early stage. This could be very effective when it comes to ship motion control since the ship control system is a typical strong nonlinear system which is susceptible to varying parameters and environmental disturbances, and whose manoeuvrability is not good enough to respond timely when an emergency happens. Furthermore, for the limits on dynamics as well as safe, economical and environmental reasons, there could be various constraints on actions, states, and outputs; MPC can handle those constraints in an explicit way.
Funding
This research is supported by the China Scholarship Council under Grant 201206950021 and the VENI project "Intelligent multi-agent control for flexible coordination of transport hubs'' (project 11210) of the Dutch Technology Foundation STW, a subdivision of the Netherlands Organization for Scientific Research (NWO).
Contact
Huarong Zheng
PhD Candidate
Delft University of Technology
Faculty of Mechanical Engineering (ME)
Section Transport Engineering and Logistics
Mekelweg 2, 2628 CD, Delft, The Netherlands
Room: 34 B-1-290
T +31 (0) 15 278 9884
E h.zheng-1@tudelft.nl
Promotor: Prof. dr. ir. G. Lodewijks
Co-Promotor/Daily supervisor : Dr. Rudy. R. Negenborn
References
[1] E. SNAM, “Nomenclature for treating the motion of a submerged body through a fluid,” New York: Technical and Research Bulletin, pp. 1–5, 1952.