Underactuated hands
Delft Hand
We developed a powerful, versatile, lightweight three-fingered underactuated gripper.
The three fingers of the hands each have two degrees of freedom, all actuated by a single motor. Clever mechanisms assure a powerful and robust grip on widely varying objects with a minimum of sensing and control.
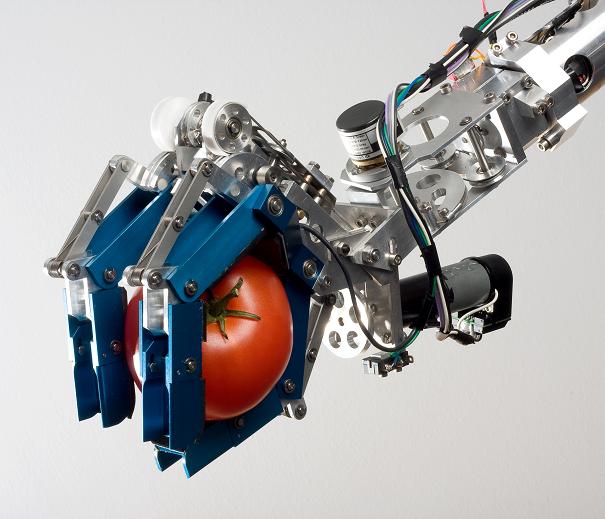
Characteristics:
- 3 x 2 degrees of freedom
- 1 low-power motor
- 1 force sensor
- 0.6 kg total mass
- 8 kg maximum payload
Video:
(right-click this link to download to your computer)