Laboratory
At the neuromuscular control lab (NMC) methods have been developed to quantify proprioceptive reflexes by application of continuous random force perturbations. Force perturbations represent a natural form of input and mimic most real life situations: the subject can actively control his position and must preserve stability in the presence of external (force) disturbances. However, in contrast to the often-used position perturbations, force perturbations require special, force-controlled, robotic manipulators. At the NMC Lab several force-controlled (also called haptic) manipulators have been developed:
- Proprio; to asses the shoulder joint
- Armanda; for planar arm movements
- PoPe; for the wrist
- GasPedal; for the ankle/foot complex
- Motion Platform
Proprio
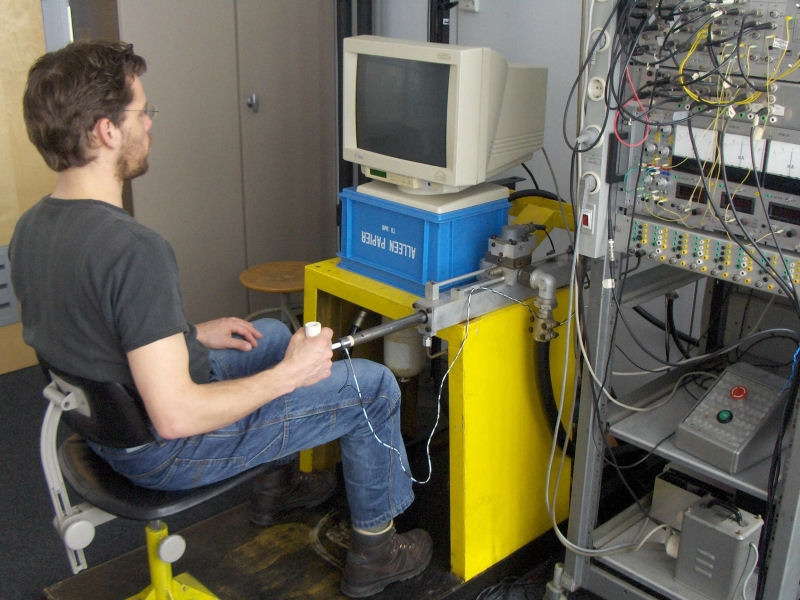
The proprio manipulator is the one of the first of its kind, operational since 1980. A force-controlled haptic manipulator even before the term haptic was commonly used. The manipulator consist of a 1 degree-of-freedom (1-DoF) hydraulic actuator with hydrostatic bearings, which guarantees very smooth operation. Through the ease of use and having only 1-DoF, it is still used, especially for student projects.
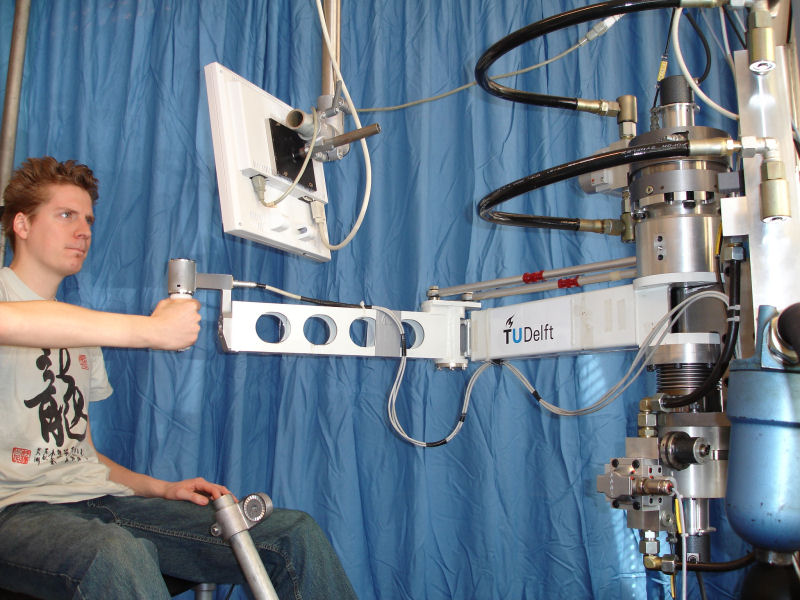
Armanda
Armanda (Arm Movement and Disturbance Analysis) is a planar haptic manipulator, powered by 2 hydraulic actuators. With this haptic device it is possible to investigate the interaction between shoulder, elbow and wrist during posteral maintenance and movement
PoPe

PoPe (from the Dutch 'Pols Pertubator', i.e. wrist manipulator) is a device to assess the wrist joint. To be able to measure in a hospital, there was a need for a relatively small, preferably electric-powered device; that is the PoPe.
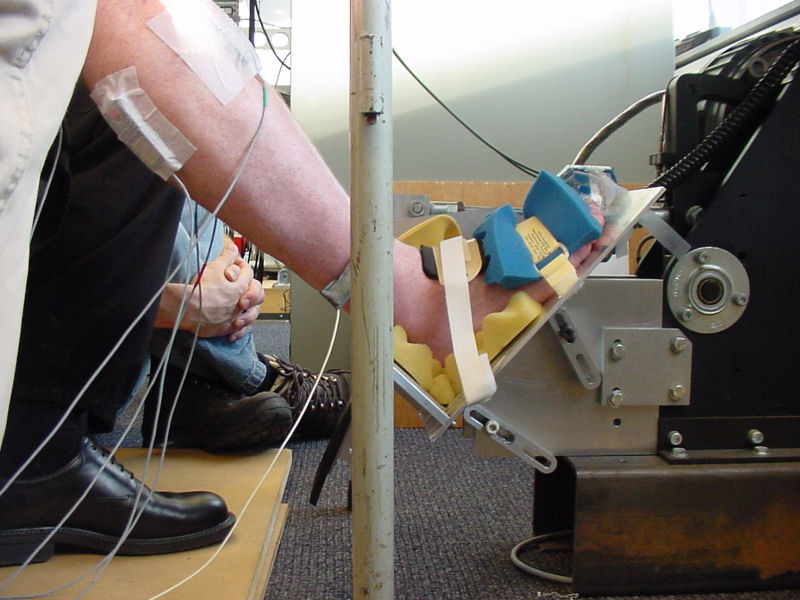
GasPedal
The gas pedal is initially developed to investigate the possibilities and limitations of providing continuous haptic feedback on the gas pedal to inform drivers of hazards in front of their car. Nowadays it is also used to assess reflexes around the ankle.
Motion Platform
A hexapod motion platform is being used to test head-neck stabilisation and lumbar stabilisation in seated subjects.