News & Events
Events
Past Events


An equitable and stable two-sided matching problem for a crowd-shipping market with Prof. Jane Lin from the University of Illinois Chicago
2nd June 2023 (15h CET). Webinar hosted in collaboration with F&L lab.Immersive Virtual Reality to study transport behaviours. Challenges and potentiality with Prof. Elisabetta Cherchi from Newcastle University.
12th May 2023 (15h CET). Webinar hosted in collaboration with MXR lab.Implications of three autonomous mobility scenarios: a comparison between Lyon, France and Montreal, Canada with Dr. Francesco Ciari from Polytehcnique de Montréal
7th March 2023 (14h CET)Planning Charging Facility for Electric Buses with Energy Storage and Photovoltaic Systems with Prof. Xiaolei Ma from Beihang University, China
20th January 2023 (14h CET)




News
Metropolitan Mobility Conference
Gonçalo participated in the opening session of the final conference of the e-Hubs project (Interreg). A panel discussion took place between the research organizations involved in the WP modelling. Minute 40 is where the researchers of the project discuss the main results.
We are happy to announce that Dr. Irene Martinez will join the hEAT lab on August 15th as a Tenure Track Assistant Professor of the Civil Engineering and Geosciences faculty, Department of Transport & Planning. Dr. Irene Martinez obtained her Ph.D. from the University of California, Irvine earlier this year.

Webinar on the deployment potential of automated minibuses for first/last mile transport
On Wednesday 26th of May, 2021, the hEAT Lab together with the Smart PT Lab organised a webinar on the deployment potential of automated minibuses for first/last mile transport. The webinar was organised by Irene Zubin and Maryna Öztürker, PhD candidates at the TU Delft, with the help of dr. Gonçalo Correia, director of the hEAT Lab, and dr. Niels van Oort, director of the SPT Lab.
Prof. Bart van Arem opened the webinar with an inspiring presentation on the opportunities and challenges of automated driving and the relevant topics that TU Delft is currently researching. Gonçalo and Niels continued with an introduction of their labs, showing the important connection between vehicles automation and the public transport sector.
-
The webinar continued with international speakers from different research institutes and organizations presenting their findings and sharing their insights on the behavioural aspects and integration strategies of this new transport mode.
The list of speakers and the topic of their presentation is as follows:
- Irene Zubin, Delft University of Technology
Lessons learned from existing pilots and deployment scenarios for automated shuttles - Maryna Öztürker, Delft University of Technology
User's perspective on automated minibuses and their service type - Yusak Susilo, The University of Natural Resources and Applied Life Sciences in Vienna
Capacity and knowledge building through multiple deployments of automated bus services - Kara Kockelman, University of Texas at Austin
Micro-simulations of shared automated vehicles for first-mile last-mile transit connections - Patrick van Norden, Metropoolregio Rotterdam Den Haag (MRDH)
Experiences and plans with automated shuttles within the Rotterdam-The Hague area - Joop Veenis and Ahmed Hashish, The Future Mobility Network
Experiences on real-life implementations and lessons learned
Interested? Find out more about these topics on the webinar recordings and in the speakers’ presentation.
- Irene Zubin, Delft University of Technology
Forum ISTS 2020 conference
From the 3rd to the 6th of November the hEAT Lab held the conference IEEE Forum ISTS 2020. This was organized online due to covid-19. The conference had 130 attendees who have given 97 presentations in 37 sessions, including 8 sessions on Shared Mobility; 3 sessions on Connected Automated Vehicles; 4 sessions on Modelling, Control and Simulation; 3 sessions on Electric Transportation Systems; and 3 sessions on Freight & Logistics. The conference also provided 4 live workshops: Open Science in ITS research (Tuesday), Platform based Transportation (Wednesday), Electrification of public transport (Thursday), and Public transport of the future (Thursday). We had the pleasure of having three live keynotes: Prof. Yafeng Yin (Tuesday), Prof. Kara Kockelman (Wednesday), and Prof. Makos Papageorgiou (Thursday). As an on-campus event transmitted online we had a demon on the interaction of intelligent vehicles with vulnerable road users whose video you can see below. From the hEAT Lab Gonçalo Correia chaired the conference together with Meng Wang and Bart van Arem. Simeon Calvert chaired the workshops. Several of the hEAT lab members helped with the organization of the conference and helped manage its daily activities. Thank you to all.
Autumn school on Automated driving online
Between the 28th and the 30th of October 2020 TRAIL research school for Transport Infrastructure and Logistics together with the hEAT lab have organized the Autumn school on Automated driving online.
This school had more than 25 participants from different countries around the world. The attendees had lectures on ethics, planning, human factors, traffic management, safety, and technology of automated vehicles giving them a very complete overview of the challenges associated with the take-up of these vehicles.
On the last day prof. Kara Kockelman from UT Austin gave the students a lecture and discussed with them a selection of important topics that require future research.
Gonçalo Correia and Bart van Arem from Civil Engineering led the organization of this school together with Vincent Marchau of the Faculty of Technology Policy and Management from TU Delft.
Freddy Mullakkal-Babu defended his PhD thesis
On 14 September, Freddy Mullakkal-Babu successfully defended his PhD thesis: Modelling Safety Impacts of Automated Driving Systems in Multi-Lane Traffic. The co-promotor is Meng Wang and promotors are Bart van Arem and Riender Happee. Committee members include: Prof. Dongpu Cao from University of Waterloo, Prof. Ronghui Liu from University of Leeds, Eric van Berkum from University of Twente, Bart De Schutter from TU Delft. The public defence was oriniginally scheduled on 16 March, but was postponed due to COVID-19.
-
The thesis deals with safety assessment of automated driving systems. The past three decades have witnessed the emergence of several automotive applications that take over the task of vehicle driving on a sustained basis. The most advanced class of such applications is known as Automated Driving Systems (ADSs). ADS can autonomously operate the vehicle on road stretches that fall under its operational design domain. Industry and governments expect that such systems will be technologically feasible shortly and the traffic will be mixed with system-driven and human-driven vehicles. Even though ADSequipped vehicles will have an impact on traffic safety, there is no clarity on if they would enhance or detriment traffic safety and at what conditions and magnitude. A human and an ADS apply fundamentally different processes to acquire information, make decisions, and operate the vehicle. Therefore, our current insights on the relationship between driving behaviour and safety may not be sufficient to predict the possible impacts of ADS systems. Hence there is an urgent need to study the impacts of ADS functionalities and design factors on traffic safety.
Thesis is available here.
Virtual Kick-off of H2020 Marie Skłodowska-Curie Innovative Training Network Project: SHAPE-IT
On 12 October, the kick-off meeting of SHAPE-IT project took place online.
SHAPE-IT, short for Supporting the interaction of Humans and Automated vehicles: Preparing for the Environment of Tomorrow, is a Marie Skłodowska-Curie Innovative Training Network (ITN) project that has received funding from the European Union’s Horizon 2020 research and innovation programme.
The project has a duration of four years starting October 1st 2019. Fifteen Early Stage Researchers (ESRs), i.e., PhD-students, will perform research in the project, together with their academic and industrial supervisors.
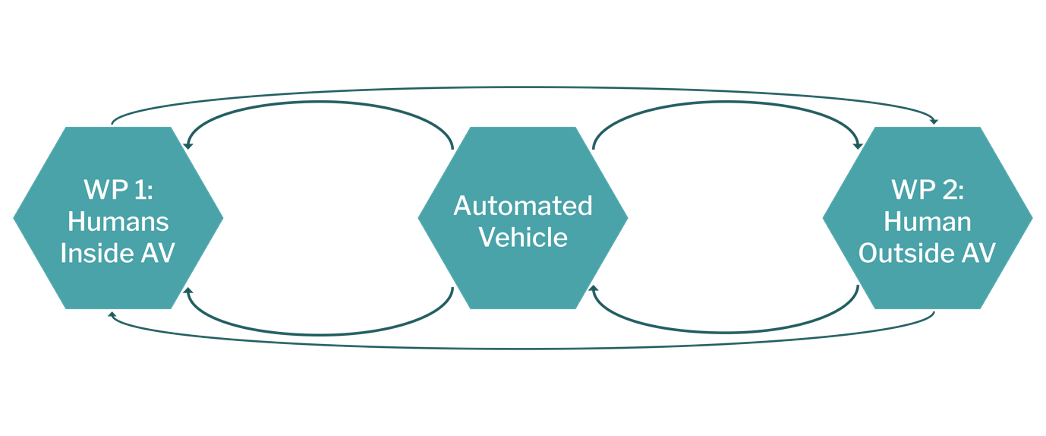
The overall goal of SHAPE-IT is to enable rapid and reliable development of safe and user-centred automated vehicles (AVs) for urban environments. Vehicle automation has been identified as a game-changer in transport, promising substantial reductions in road-traffic fatalities while improving mobility. However, the processes to integrate automation in transport have been primarily technology-focussed, with insufficient consideration given to how users both inside and outside of the AVs will interact with AVs.
Xiaolin He (ESR 12), a PhD member of the hEAT lab, is working on AV occupants’ perception of safety in relation to AV behaviour, under the supervision of Riender Happee and Meng Wang.
Launch of H2020 SAFE-UP project
Horizon 2020 project SAFE-UP officially started on 22 June, 2020. The consortium met virtually in the kick-off meeting. During the kick-off event, all partners presented their objectives and this gave opportunities to discuss the next steps of the project and to understand what all the different stakeholders could bring to the project!
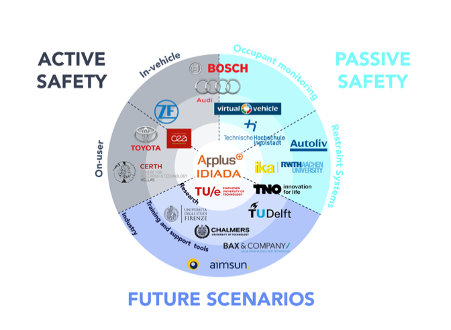
SAFE-UP is the shortname for PROACTIVE SAFETY SYSTEMS AND TOOLS FOR A CONSTANTLY UPGRADING ROAD ENVIRONMENT. It consists of three key pillars:
- future safety-critical scenarios
- new safety technologies
- novel safety assessment methodologies.
-
As innovations like connected automated vehicles (CAVs) disrupt mobility as we know it, new safety challenges will keep emerging. Rather than using the traditional approach of post-collision analysis, SAFE-UP is proactively designing and analysing safety-critical scenarios in a highly automated and mixed traffic environment by integrating traffic accident data and future traffic conditions with new forms of safety metrics and sub-microscopic models in a traffic simulation platform. To validate the potential of these concepts, SAFE-UP will use two types of use cases (one urban and one non-urban) covering at least 64% of all current traffic fatalities.
Based on the findings, new safety technologies and safety assessment methodologies can be designed in tandem with the new mobility, rather than lagging behind.
SAFE-UP will address these upcoming road safety challenges by identifying future safety-critical scenarios and develop tools and new technologies accordingly, for both active and passive safety systems, in four demos.
Demo 1. Passive safety systems in new seating positions
Demo 2. VRU detection under bad weather conditions
Demo 3. Advanced intervention functions to avoid critical events
Demo 4. Communication framework for timely warning provisions
SAFE-UP’s holistic approach means that all road users are considered, including those outside the car.
To complement the safety assessment methodologies, SAFE-UP will also produce targeted education and training schemes to raise awareness of the new road safety challenges we’ll face and the best ways to tackle them.
The combined effect of the 4 SAFE-UP demonstrators will be to prevent 5244 fatalities and 173,273 serious injuries by 2050, which, compared to 2016’s figures, represents a reduction of 32.59% and 69.31% respectively, providing over 2900 jobs by 2025.
First hEAT Lab Research Seminar
On the 6th of December 2019 the first Research Seminar of the hEAT Lab took place. The theme of seminar was: Models for unravelling a future with Automated Vehicles: a multi-scale approach.


TU Delft participates in the consortium meeting of the e-Hubs project in Leuven
Fanchao Liao presented TU Delft’s latest work on the e-hubs project in Leuven: a state of the art review on shared electric mobility and a quick scan method to find the areas of a city showing the greatest potential for installing such e-hubs.

Xiao Liang defended her PhD thesis
On Monday the 30th of September Xiao Liang has defended successfully her PhD thesis with the title: “Planning and Operation of Automated Taxi Systems”.

Gonçalo Correia gave a seminar at the hEART conference
Gonçalo Correia gave a lecture in the summer school of the hEART conference in the past 3rd of September on the topic of “Impacts of vehicle automation on urban areas costs and benefits of a technology that is set to change the way we move”. About 65 PhD students attended the school that happened the day before the conference in Budapest, Hungary.


Interested in contributing an article?
Connected and automated vehicle (CAV) systems will potentially bring many changes to urban and interurban mobility. Integrating CAV technologies within the traditional road environment interacting with the different road users leads to important research questions, since their potential on shared mobility, the reduction of traffic congestion, energy use efficiency, pollutant emissions and noise reduction is still unclear. Therefore, there is a need for detailed and accurate studies on the estimation on the effects of CAV technologies on transportation externalities.
Kick-off hEAT lab: The hEAT is on
The hEAT lab has been created with an internal kick-off at the Department of Transport & Planning on the 24th of June, 2019. In this meeting, the members were able to discuss with the co-directors topics such as internal organization and research priorities. The hEAT is on!

The eHUBS project kicks off
The EU project eHUBS, co-funded by European Commission’s Interreg North-West Europe Programme, kicked off its activities at a partner meeting on the 10th of April 2019 in Lille. This ambitious project wants to increase the uptake of shared electric mobility solutions by end-users, through the deployment and promotion of e-Mobility hubs.
Gonçalo Correia gave a seminar at Portland State University
Gonçalo Correia gave a seminar at Portland State University last 10th of May at Portland State University entitled: “Impacts of automation on urban areas: some results of TU Delft research”.
The seminar at PSU on youtube:
Presentation by Dr. Luiz Martinez (OECF-ITF)
A seminar was given by Luis Martinez (OECD-ITF) on Monday the 11th of March from 15:30 to 16:30 2.62, entitled: “Assessing pathways for the decarbonisation of the transport sector until 2050: developing the ITF in-house modeling tools for passenger and freight transport demand and supply”.
-
This is a joint organization by the hEAT lab (electric and automated transport research lab) and the freight and logistics lab of the Department of Transport & Planning.
In this presentation, Luis Martinez will introduce the International Transport Forum (ITF) at the OECD which is an intergovernmental organization with 59 member countries. It acts as a think tank for transport policy and organizes the Annual Summit of transport ministers. The ITF is the only global body that covers all transport modes for passengers and freight.
ITF has been developing in the last years their modeling capabilities in house. The scope of the models ranges from a very detailed microsimulation model to global aggregate forecasting models. Microsimulation models are used to analyze urban mobility behavior and test scenarios of supply or demand at a specific case study city. Aggregate models are used to global analyses that aims at estimating the current and future transport activity and externalities under different future developments. In this talk, Luis will focus on describing the current global framework of passenger and freight models the ITF developed for the Outlook 2019, ITF key publication, and discuss how future innovations and potentially disruptive technologies and services have been incorporated and modeled in its different components.
About Luis Martinez:
Luis Martinez works as a Lead Modeller / Transport Analyst at the International Transport Forum at the Organisation for Economic Cooperation and Development (OECD) in Paris, France. At the ITF he has been working on the ITF's Transport Outlook long term analysis models (urban mobility, non-urban passenger mobility and freight) and coordinate and develop projects related with shared urban mobility modelling in several cities (Lisbon, Helsinki, Auckland and Dublin).
Prior joining the ITF in 2014, Luis spent three years as Assistant Professor with the Civil Engineer Department, Instituto Superior Técnico, Portugal and is author of several research papers on transport modelling, transport economics and public transport design optimisation and simulation.
Presentation by Dr. Raphael Stern (TU Munich and University of Minnesota)
A presentation was given by Dr. Raphael Stern with the title: Increased vehicle automation and traffic flow stability: experimental insights
This work is motivated by the possibility of a small number of autonomous vehicles (AVs) or partially autonomous vehicles that may soon be present on our roadways, and the impacts they will have on traffic flow.
-
This automation may take the form of fully autonomous vehicles without human intervention (SAE Level 5) or, as is already the case in many modern vehicles, may take the form of driver assist features such as adaptive cruise control (ACC) or other SAE Level 1 features. Regardless of the extent of automation, changing the vehicle dynamics of a small number of vehicles in the bulk traffic flow may have substantial implications on the underlying traffic dynamics and may influence traffic stability and the development of emergent phenomena such as phantom traffic jams.
In this talk, I present some recent experimental work conducted to understand the car following behavior of commercially available ACC vehicles. The two-vehicle car following data is collected, and models are calibrated to describe the vehicle-level ACC car following behavior. These models are then analyzed for string stability. Of the seven vehicle models tested, all are found to be string unstable. To validate the models for multi-vehicle simulations, a platoon test with seven ACC following vehicles of the same make and model is also conducted.
Bio: Dr. Raphael Stern is a post doctoral fellow in the Department of Informatics at the Technical University of Munich, and will be joining the faculty in Civil, Environmental, and Geo- Engineering at the University of Minnesota as an Assistant Professor in 2019. Prior to joining TU Munich, Dr. Stern was a visiting researcher at the Institute for Software Integrated Systems at Vanderbilt University. Dr. Stern received a bachelor of science degree (2013), master of science degree (2015), and Ph.D. (2018) all in Civil Engineering from the University of Illinois at Urbana-Champaign. Dr. Stern was a visiting researcher at the Institute for Pure and Applied Mathematics at UCLA, and a recipient of the Dwight David Eisenhower Graduate Fellowship from the Federal Highway Administration. Dr. Stern's research interests are in the area of traffic control and estimation with autonomous vehicles in the flow.