String Strategies of Cooperative Adaptive Cruise Control (CACC) Vehicle for High-Performance Streams
Subject
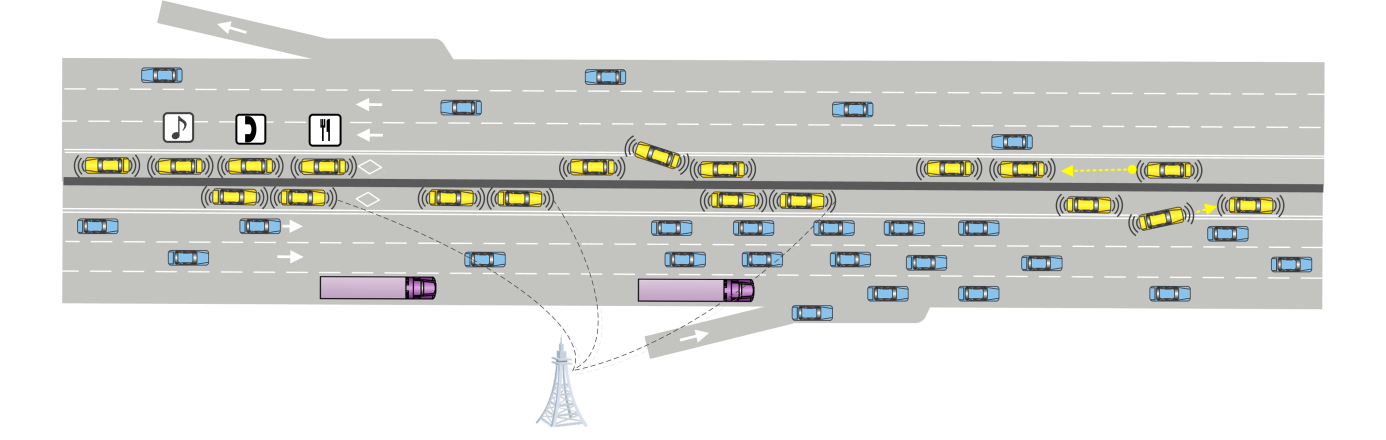
Cooperative adaptive cruise control (CACC) is an automated longitudinal control by making use of vehicle-vehicle communication. It is highly expected to form automated vehicle strings and high-efficiency traffic stream. This research aims to develop applicable and flexible strategies and algorithms for CACC vehicle strings in realistic traffic environment to achieve high traffic performance. Operational strategies for car-following, string formation/dissolution and vehicle join/leave will be firstly deliberated and impacts of the strategies on traffic flow will be assessed. Specific strategies will be designed in scenarios with low automated vehicle market penetration rates, with dedicated infrastructures and realistic traffic bottlenecks.
Scientific challenges
One of the scientific challenges is the difficulty to build a microscopic traffic simulator to test the CACC vehicle string strategies, capable of representing realistic and diverse vehicle behaviours as well as complex decision-making process in automated vehicle string operations. Another challenge is the complexity of developing two-layers vehicle control strategies, considering both individual objectives in each layer and the trade-off between traffic safety and efficiency from the aspect of macroscopic traffic flow. Besides, capability and flexibility of string strategies in diverse scenarios are one of the factors contributing to the challenges of this study.

Lin XiaoStart/end date: 1st April,2014-April, 2018Daily supervisor: Meng Wang, Raymond Hoogendoorn Promotor: Bart van Arem |