ESA persbericht: dronerace bereidt neuraal-netwerk AI voor op ruimtevaart
Drones racen tegen de klok in de 'Cyber Zoo' van de Technische Universiteit Delft om de prestaties te testen van op neurale netwerken gebaseerde AI-besturingssystemen die gepland zijn voor de volgende generatie van ruimtemissies. Het onderzoek - uitgevoerd door ESA's Advanced Concepts Team samen met het Micro Air Vehicle Laboratory, MAVLab, van de TU Delft - is gepubliceerd in het laatste nummer van Science Robotics. Lees hieronder het persbericht van ESA over deze samenwerking.

“We doen al lang samen onderzoek naar trainbare neurale netwerken die autonoom toezicht kunnen houden op allerlei veeleisende manoeuvres van ruimtevaartuigen, zoals interplanetaire transfers, landingen op het oppervlak van verre planeten en koppelen van ruimtevaartuigen,” stelt Dario Izzo, wetenschappelijk coördinator van het ACT.
“In de ruimte is het zaak om alles zo efficiënt mogelijk te gebruiken, zo ook drijfgas, energie, computerkracht en zelfs tijd. Met neurale netwerken optimaliseer je de bedrijfsvoering aan boord, waardoor de missie autonomer en betrouwbaarder wordt. Maar voordat we deze aanpak ook echt konden toepassen op ruimtemissies, moesten we deze eerst testen in de praktijk.

In drone-races vonden we de ideale setting voor het testen van end-to-end neurale architectuur op functionerende robotica, zodat we meer vertrouwen konden kweken dat ze het in de ruimte ook goed doen.”
De drones proberen allemaal de beste tijd neer te zetten op een vast parcours van 10x10m in de Cyber Zoo van de TU Delft, dat wordt onderhouden door de faculteit Luchtvaart- en Ruimtevaarttechniek. Door mensen bestuurde 'Micro Air Vehicle'-quadcopters werden afgewisseld met autonome drones voorzien van neurale netwerken die op verschillende manieren waren getraind.
“Traditioneel worden manoeuvres van ruimtevaartuigen op de grond in detail gepland en vervolgens naar het ruimtevaartuig geüpload om te worden uitgevoerd,” legt Sebastien Origer, Young Graduate Trainee bij ACT, uit. “In principe wordt er onderscheid gemaakt tussen Guidance (Begeleiding) en Control (Besturing), waarbij Guidance op de grond plaatsvindt en Control in het ruimtevaartuig.”

De ruimte is echter inherent onvoorspelbaar, dus loop je het risico op allerlei onverwachte zaken en ruis, zoals schommelingen in de zwaartekracht, atmosferische turbulentie of planeten die er in de werkelijkheid anders uitzien dan in onze modellen.
Wanneer het ruimtevaartuig om welke reden dan ook afwijkt van zijn geplande pad, brengt het besturingssysteem het in principe terug naar het ingestelde profiel. Het probleem is dat een dergelijke aanpak veel beslag legt op de middelen aan boord, omdat er een groot aantal brute kracht correcties voor nodig is.
Sebastien voegt toe: “Onze alternatieve end-to-end G&C Nets-aanpak (Guidance & Control Networks) omvat al het werk dat normaliter aan boord plaatsvindt. In plaats van één vaste koers te volgen, zoekt het ruimtevaartuig voortdurend opnieuw zijn optimale baan op basis van de huidige positie, wat veel efficiënter blijkt te zijn.”
Neurale netwerken, die net als onze hersenen bestaan uit onderling verbonden neuronen, presteerden goed in computersimulaties wanneer ze getraind werden met behulp van 'gedragsklonen', gebaseerd op langdurige blootstelling aan voorbeelden van experts. Toen kwam de vraag hoe we vertrouwen in deze aanpak konden creëren in de praktijk. Het antwoord vonden de onderzoekers in drones.
“Er zijn heel wat synergieën tussen drones en ruimtevaartuigen", legt Dario uit, "hoewel de dynamiek bij het vliegen met drones veel sneller en luidruchtiger is.”
"Bij het racen is tijd natuurlijk de belangrijkste factor, maar we kunnen die parameter gemakkelijk vervangen voor andere variabelen die misschien belangrijker zijn in een ruimtemissie, zoals drijfgas.” Satelliet-CPU's zijn behoorlijk beperkt, maar onze G&CNETs zijn verrassend bescheiden en slaan slechts 30.000 parameters op in het geheugen, waar je slechts een paar honderd kilobytes en minder dan 360 neuronen voor nodig hebt.”
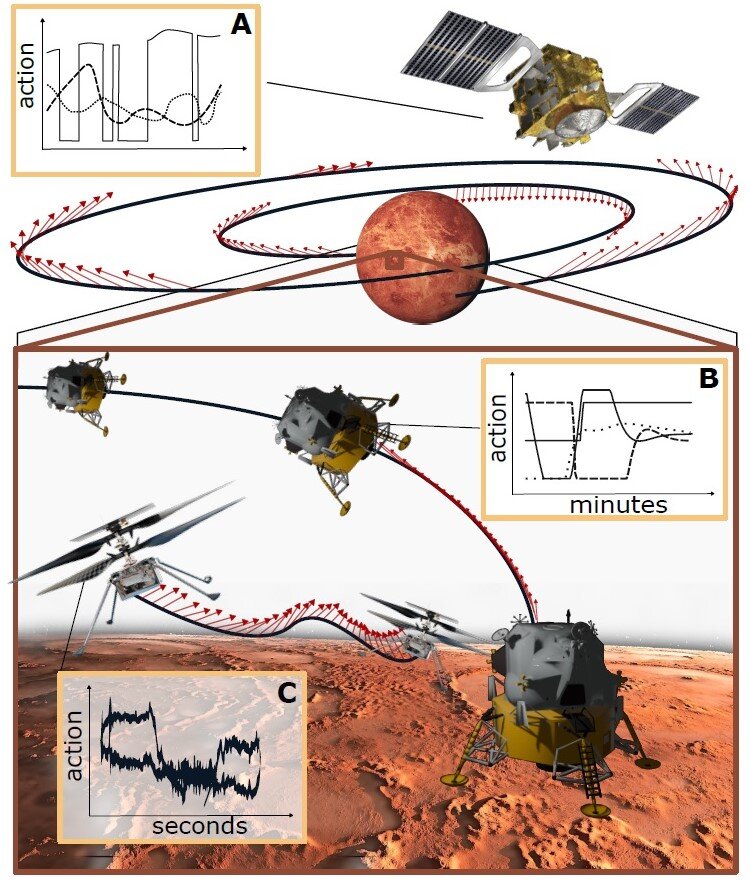
Om optimaal te werken moet een G&CNet commando's rechtstreeks naar de aandrijving sturen. In een ruimtevaartuig zijn dit de stuwraketten en in het geval van drones de propellers.
“Om G&CNets goed op drones toe te passen, was de grootste uitdaging het verschil tussen de actuatoren in simulatie en in werkelijkheid, de zogeheten reality gap”, zegt Christophe De Wagter, hoofdonderzoeker aan de TU Delft. “We pakken dit aan door de reality gap tijdens het vliegen te identificeren en het neurale netwerk te leren met afwijkingen om te gaan. Als de propellers bijvoorbeeld minder stuwkracht geven dan verwacht, herkennen de versnellingsmeters dit direct. Het neurale netwerk herberekent dan de commando's om ervoor te zorgen dat de drone het nieuwe optimale pad volgt.”
“Er heeft zich inmiddels een hele groep wetenschappers toegelegd op het drone-racen, en die willen allemaal maar een ding: races winnen,” zegt Sebastien. “Voor onze G&CNets zijn de drones een manier om vertrouwen op te bouwen, een deugdelijk theoretisch kader te ontwikkelen en veiligheidsgrenzen vast te stellen. Als we dat voor elkaar hebben, kunnen we een demo doen met een echte ruimtemissie.”

Afzonderlijke dronevluchten met hetzelfde neurale systeem

Contact
Dr. G.C.H.E. (Guido) de Croon
G.C.H.E.deCroon@tudelft.nl

Contact
Dr.ir. C. (Christophe) de Wagter
C.deWagter@tudelft.nl