Designing better catheters – with both more and less friction
The use of catheters - thin, flexible tubes through which medics can insert surgical instruments - has revolutionised minimally invasive medical procedures, even ones as complex as brain or heart surgery. The challenge now is to improve the design of catheters so that they can easily pass along the blood vessels during insertion – yet stay in place once they reach their target location. In other words, the new generation of surgical catheters needs to produce both more and less friction.
Originally brought together as part of an inter-technical university Soft Robotics project, Aimée Sakes of ME’s Bio-Mechanical Engineering Department and Michaël Wiertlewski of the faculty’s Cognitive Robotics Department soon realised that despite their very different backgrounds, the challenge of modulating friction within one device was one that appealed to them both, and thus a new Cohesion Project was born.
One of the challenges with catheters is that human blood vasculature has many tiny curves so it’s very difficult to feed a passive tube around these curves.
Friction and infection
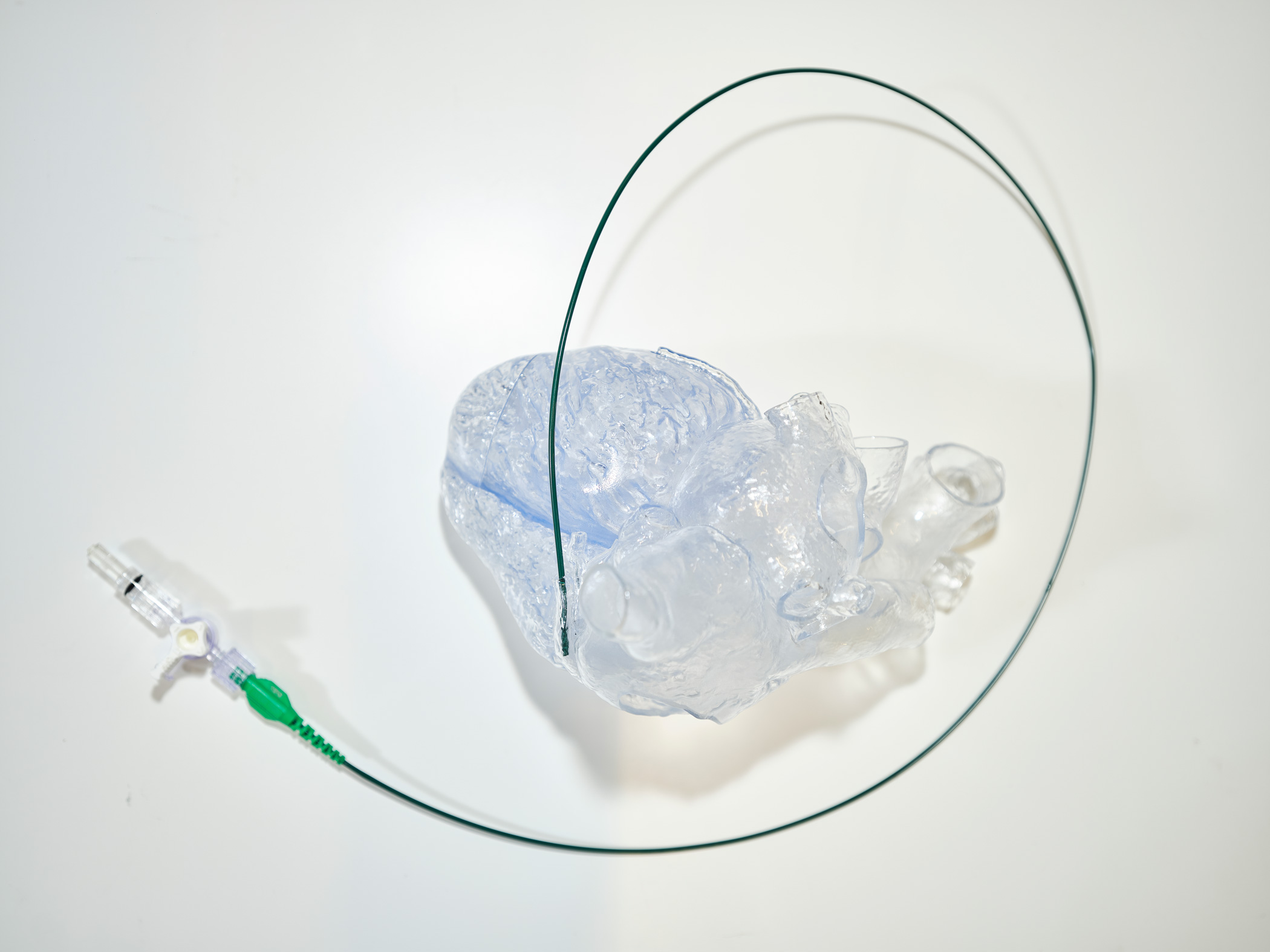
Sakes’ background is in the development of soft robots for use inside the human body mainly during minimally invasive heart or brain surgery: “One of the challenges with catheters is that human blood vasculature has many tiny curves so it’s very difficult to feed a passive tube around these curves. So we have been able to design steerable catheters that have a tip that you can actively bend to help navigate the catheter to the desired position in the body.”
Another major challenge is the friction caused between the catheter and the blood vessel wall when the catheter is being fed into the body: “This friction can damage the blood vessel leading to inflammation and possibly to blood-clots which can either block an artery or cause a stroke.” And when the catheter is removed, these friction issues become even greater because the artery tends to suck the catheter in: “This is a particular issue in cases where when the catheter has almost the same diameter as the blood vessel,” says Sakes, “such as in surgery to replace leaky heart valves.”
But once the catheter is where it needs to be, it then has to stay in that location and not move during the surgical procedure. This is a particular challenge in heart surgery where the pumping blood is continually buffeting the catheter making it very difficult to operate or take a biopsy for example. So an ideal design for this type of catheter would be one in which the friction could be modulated to be lesser or greater as required.
We have been able to design steerable catheters that have a tip that you can actively bend to help navigate the catheter to the desired position in the body.
Aimée Sakes
Haptics
Wiertlewski’s background in Cognitive Robotics, meanwhile, focuses on Human-Robotic Interaction and Haptics, which is all about stimulating the sense of touch in people such as grabbing keys in your pocket or touching a keyboard or a touchscreen. “We use this sense everyday without realising it and yet all this haptic information is important to the brain. So I’m studying how can we make devices that give that tactile information back to the user when they interact with a computer.” One of Wiertlewski’s research specialisations is creating the illusion of 3-D structures or “bumps” on a flat screen using ultrasound: “So think of your smart phone or iPad – right now it’s just a flat surface but with this technology we can create the illusion of feeling shapes, so that you ‘feel’ icons or textures or shapes.”
This project is about the need to modulate friction of living human tissues, albeit tissues inside the body.
This sensing of icons on a flat screen is of particular interest to car-manufacturers trying to tackle the increasing incidence of ‘Driver Distraction’ already responsible for around 60% of traffic accidents: “In older cars, if you want to turn on the air-co, you can do it without taking your eyes off the road by just feeling the control knobs. That’s because you’ve had that tactile feedback, which trains your so-called muscle memory – we call it procedural memory – and that’s very useful for having a sense of where things are and how things operate. But with the touchscreens you find in modern cars, you don’t have that tactile feedback anymore so you have to look at the screen which means taking your eyes off the road.” Using ultra-sonics, Wiertlewski has been able to develop a new technology that creates the illusion of shape and of being guided to an icon: “The way we change friction is that we send ultra-sound, so really high frequency vibrations, that are so quick and small, your skin doesn’t feel the vibrations but it does feel the change in friction.”
On hearing about Wiertlewski’s research, Sakes immediately realised that this new technology might also work in catheters as “…Michaël was working on a way to provide the user with tactile sensations by varying the way the skin resists when it slides on a flat surface.” “And I recognised that this project was about the need to modulate friction of living human tissues, albeit tissues inside the body which is new for me, ” adds Wiertlewski.
4-year project
One year into this four year Cohesion project, Sakes, Wiertlewski and a third member of the team, PhD candidate Mostafa Atalla, have been able to answer the first of their two research questions; namely is it possible to modulate friction with ultrasound inside the body rather than outside? At first, simplified fluid dynamics models suggested their idea wouldn’t work but after performing more complex simulations and then carrying out experiments using “a sort of reduced version of a catheter”, the team came with the answer they were hoping for. Atalla: “Yes it’s possible – we were able to demonstrate the capability of modulating friction in a submerged environment.”
“Which was a relief,’ adds Wiertlewski. “So now we’re trying to understand the physics behind it.”
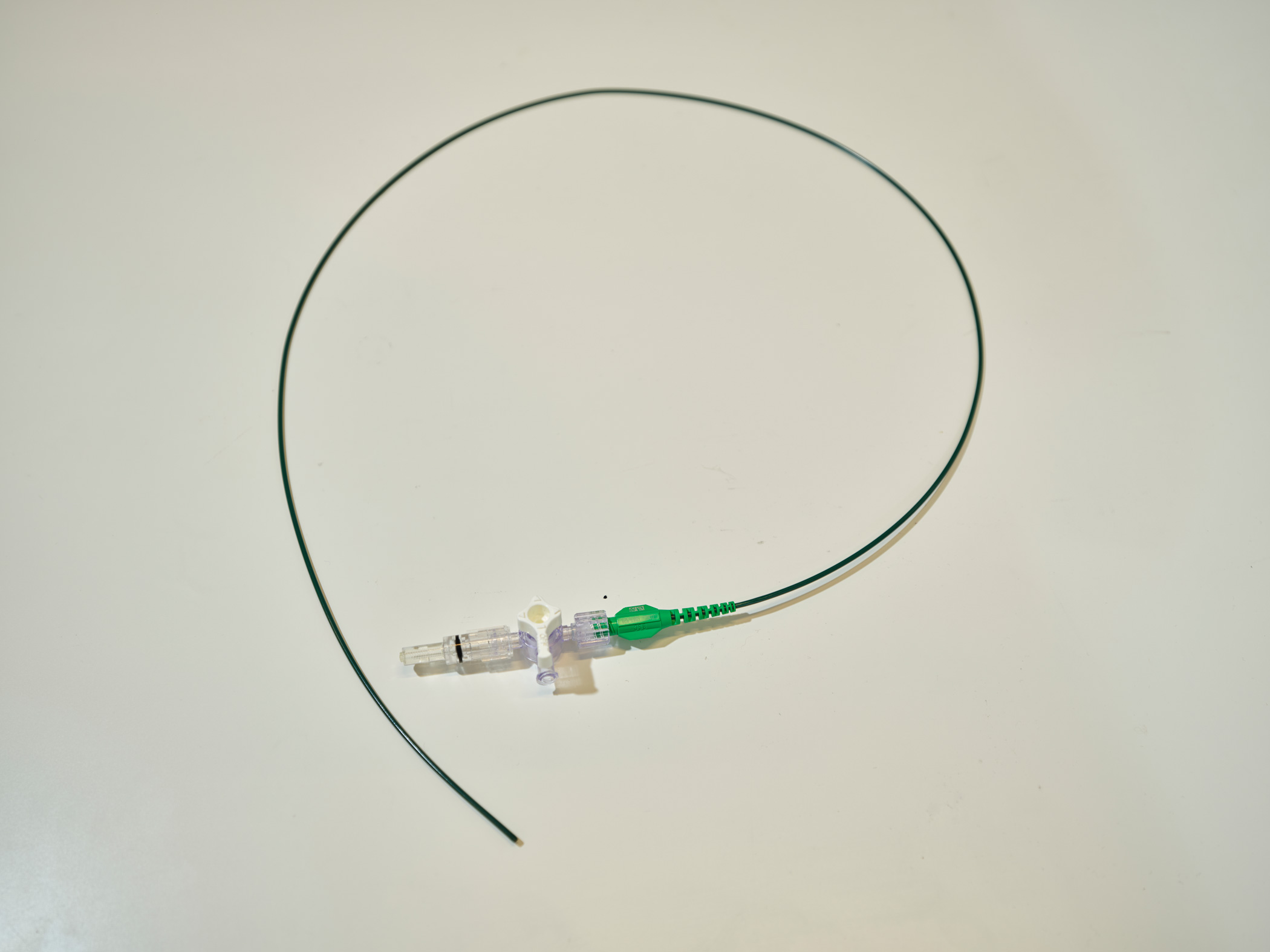
Meanwhile the second research question to be addressed is how to apply these different friction modulation devices to catheters. “Ideally, what we want is a very long catheter with many different segments that operate independently from each other,” says Sakes, “so the low friction bit can actually move and the high friction bits can stay put – and that’s a very different problem, which we haven’t yet tackled.”
“The next stage,” adds Atalla, “is to develop some type of prototype so like a flexible tube just to illustrate the principle that this system could work inside another flexible tube so imitating the situation of a catheter within a blood vessel.”