Trajectory Tracking Control of Underactuated Surface Vessels
Introduction
Vessel intelligence is the trend of science and technology and need of the public. As an essential part of it, how to realize autonomous navigation is a key and challenging problem. Meanwhile, trajectory tracking control for vessel is a fundamental step for autonomous navigation. As a majority of ships to be controlled have no sway force control available and there are fewer control inputs than the degrees of freedom, they are a class of underactuated systems with nonintegrable dynamics. Therefore, trajectory tracking control of underactuated surface vessels has been studied in recent years.
There are several control methods used in trajectory tracking, i.e. Sliding Mode Control (SMC), Model Predictive Control (MPC), Backstepping, Line of Sight (LOS), Robust Control, Intelligent Control and so on. SMC has the advantages in the nonlinear system control, and is widely used in the trajectory tracking such as robotic control. MPC and its combination with other methods fit the multi-inputs & multi-outputs complex system control (both linear and nonlinear) because of its receding optimization and online feedback. In these studies of trajectory tracking of underactuated vessels, environmental disturbance is considered rarely and control methods are mainly tested with simulation, that is the data in real environment are not sufficient.
Recent works
We have done some fundamental works for autonomous navigation of ship. They are shown as follows:
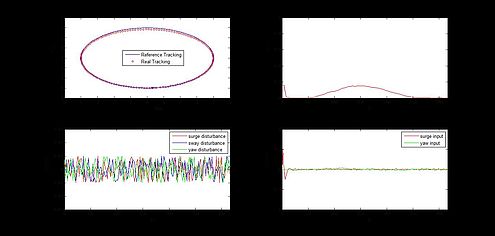
1. Simulation test of MPC
Fig.1 shows the simulation result of LMPC (Linear Model Predictive Control) used in trajectory tracking of underactuated vessels.
2. Model ship platform
The model ship platform is equipped with motor, rudder, driver circuit, battery, Wi-Fi, inertial autonavigator and so on. The computer can control the model ship remotely with Wi-Fi in the Fig.2.


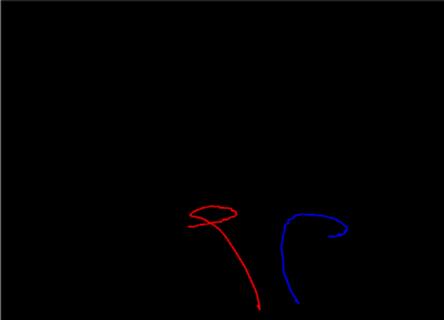
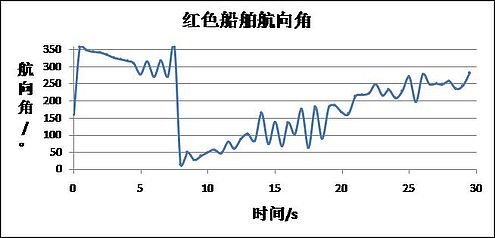
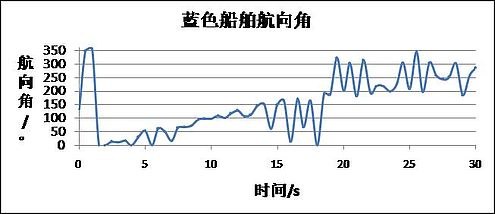
3. Vessels positioning based on Monocular vision
In trajectory tracking studies, the real-time feedback tracking is needed during control. The trajectory tracking of multi vessels can be acquired by Monocular vision. It is shown in Fig.3 and Fig.4.

4. The real vessel platform
“THE WUT VESSEL” shown in Fig.5 is 3.2 m length and 0.6 m width, which is motored by the gasoline engine with longer endurance. We can verify the method of control algorithm.

Next, our group will focus on:
- Complete the platform
- Analyzing the MPC, SMC and other methods, and applying these control methods in the simulation and model ship
- Proposing an improved method based on MPC, SMC, or combination with other algorithm used in trajectory tracking of underactuated vessels
- Formation control method and experiments
Funding
This research is supported by the China Scholarship Council under Grant 201506950053, the National Natural Science Foundation of China (NSFC) Project (Project 61273234), the Natural Science Foundation of Hubei Province Project (Project 2015CFA111), and the project of Ministry of Communications, China (Project 2015326548030).
Contact
Chenguang Liu
PhD Candidate
Delft University of Technology
Faculty of Mechanical Engineering (ME)
Section Transport Engineering and Logistics
Mekelweg 2, 2628 CD, Delft, The Netherlands
T +31 (0) 630186435
E C.Liu-3@tudelft.nl
Supervisor: Dr. Rudy R. Negenborn (R.R.Negenborn@tudelft.nl)
References
[1] Yan, Z., & Wang, J. (2012). Model predictive control for tracking of underactuated vessels based on recurrent neural networks. Oceanic Engineering, IEEE Journal of, 37(4), 717-726.
[2] Ashrafiuon, H., Muske, K. R., & McNinch, L. C. (2010, June). Review of nonlinear tracking and setpoint control approaches for autonomous underactuated marine vehicles. In American Control Conference (ACC), 2010 (pp. 5203-5211). IEEE.
[3] Moreira, L., & Soares, C. G. (2011). Autonomous ship model to perform manoeuvring tests. Journal of maritime research: JMR, 8(2), 29-46.
[4] Ding, F., Wang, Y., & Wang, Y. (2011, September). Trajectory-tracking controller design of underactuated surface vessels. In OCEANS 2011 (pp. 1-5). IEEE.