Ship Model Identification and Autonomous Collision Avoidance
Research Problem
The research focuses on Ship Model Identification and Autonomous Collision Avoidance
Background
Ship autonomous collision avoidance needs to build an accurate ship maneuvering motion model. Parameter identification of the ship motion model is an effective modeling approach in the control and simulation theory.
Ship collision avoidance methods have been developed from traditional path planning methods (i.e., A* and APF) to intelligent optimization methods (i.e., NN, Swarm Intelligence (SI) and Reinforcement learning (RL)). Recently, model-free RL methods attract more attention in intelligence decision-making area, and deep reinforcement learning (DRL) has been tried in ship collision avoidance with unknown environment. However, due to insufficient consideration of ship maneuverability, the inaccuracy of risk estimation and low learning efficiency (especially model-free RL) of these methods have become the main obstacles in practical collision avoidance.
To obtain an accurate maneuverability model, various methods have been used in ship model identification area, including nonparametric identification methods (e.g., neural network (NN) and support vector machine (SVM)), and model parameter identification methods (e.g., least squares (LS) and kalman filtering (KF)). Due to the uncertain disturbances, accurate prediction of the ship state in actual navigation is still difficult to achieve.
Objectives
The research aims to obtain an accurate ship motion model and achieve efficient real-time autonomous collision avoidance.
On one hand, in order to obtain a reliable ship model, both uncertain disturbances of the ship state and the sensors (e.g., non-uniform sampling) will be considered in ship motion model identification.
On the other hand, collision avoidance method that fully considers ship maneuverability will be studied in open and restricted waters. Moreover, dynamic encounter ships and static obstacles are both considered for collision avoidance in restricted waters. DCPAVVTVT-VVRΨαT θTThe own shipThe approaching shipRTOoxoyo
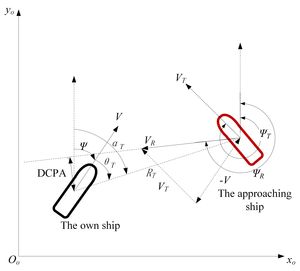
Fig.1 Ship collision avoidance diagram
Approach
As an effective approach to make full use of the agent dynamics and deal with the constraints, model-based method (e.g., model predictive control (MPC) and model-based RL (MBRL)) is beginning to be applied in collision avoidance area, which can provide supervised experiences for model-free RL (MFRL) algorithms. Therefore, we consider a model-based method (MPC or MBRL) for real-time ship collision avoidance in determined environment and combine MFRL method with the optimal policy result obtained by the model-based method for collision avoidance in uncertain environment.
In addition, to deal with the uncertain disturbances in ship model identification, extended state observer (ESO) can be used to simultaneously observe the high-order state of ship motion and unknown disturbances. Therefore, we consider a combination of ESO and the SVM method to realize the identification of continuous ship motion model and obtain a certain anti-interference capability.
Expected Results
An accurate identification method of ship model under uncertain disturbances and non-uniform sampling.
A real-time collision avoidance method in open waters based on MPC and the ship model.
A collision avoidance method in restricted waters based on Model-based RL.
Funding
This research is supported by the China Scholarship Council under Grant 201806950097, the High Technology Ship Project of Ministry of Industry and Information Technology (No.2016050001),
the Key Project of Science and Technology of Wuhan (201701021010132), and the Double First-rate Project of WUT(Wuhan university of Technology).
Contact Person
Shuo Xie
PhD Candidate
Delft University of Technology
Faculty of Mechanical Engineering (ME)
Section Transport Engineering and Logistics
Mekelweg 2, 2628 CD, Delft, The Netherlands
T +31 (0) 633465922
E S.Xie-1@tudelft.nl
Supervisor: Prof. Rudy R. Negenborn (R.R.Negenborn@tudelft.nl)