Automated Guided Vehicles (AGV) Lab
Nowadays, the use of automated guided vehicles (AGVs) for transportsystems is increasing. For both transport of persons and goods AGVs can be used. Advantages of AGV systems are a wide range of applicability, flexibility, improvement of the quality of the work environment and the possibility for integration with other automated systems such as job assignment and transport planning.

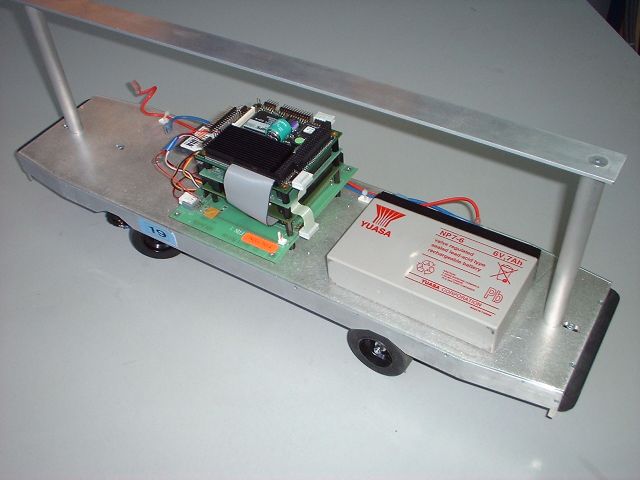
The section Transport Engineering and Logistics has a laboratory with several different types of AGVs. For experimenting with AGV systems, 25 mini-AGVs are available, scaled 1:25 according to AGVs for container transport. Each AGV is equiped with servos for driving and steering of both axis, sensors for odometry, and an Intel processor based computer with a wireless network card. A seperate camera system provides accurate positioning information for each AGV.
Objectives
The laboratory is used for both research and education. The goal of the laboratory is thus two-fold:
- let students experiment with real and simulated AGVs and AGV-systems
- research regarding complex transport systems with intelligent AGVs
The quality of AGV systems is measured by the logistic performance, the flexibility and the safety. Important issue is the integration of (logistic) simulation, system control and physical equipment, also known as 'hardware in the (simulation) loop'.
Research focus
The research in the lab will be focused towards:
- increasing the autonomy of the individual AGV
- defining the information exchange for normal operation
- defining the information exchange during error and recovery
- distributed control and interfacing with central systems for planning
- optimising the interaction between vehicles and between vehicles and equipment
- establishing right of way between vehicles
- multi-agent based control for routing
Contact
For further information please contact ir. Mark Duinkerken