Mechanisms
Mechanical Intelligence in Soft Robotics
The lack of a rigid backbone gives the arms of the octopus potentially infinite degrees of freedom, which makes them highly flexible and hyper-redundant. This would require a high level of computing resources if the body morphology of these arms would not have been designed so that their interaction with the environment simplifies their actuation. Their body morphology encodes strategies to translate a simple input into complex movements, e.g. to reach and fetch prey. Encoding these strategies in the design of artificial soft bodies can simplify the actuation of complex movements in soft robotic applications and extend soft robotic functionalities. Manufacturing techniques should be developed to incorporate this kind of intelligence in artificial soft bodies mechanically.
This study focuses on the working principles behind the embodied intelligence of the octopus arm and the development of manufacturing techniques to acquire the same level of mechanical intelligence in artificial soft bodies. Smart materials will be combined with conventional and unconventional silicone manufacturing techniques. Comparable to the octopus arm, these intelligent soft bodies are functional in small- and large-scale applications, which makes them widely employable. Examples of applications that could benefit from these intelligent soft bodies are steerable catheters for Minimal Invasive Surgery or soft grippers for deep-sea exploration.

Vera Kortman
Supervisory Team
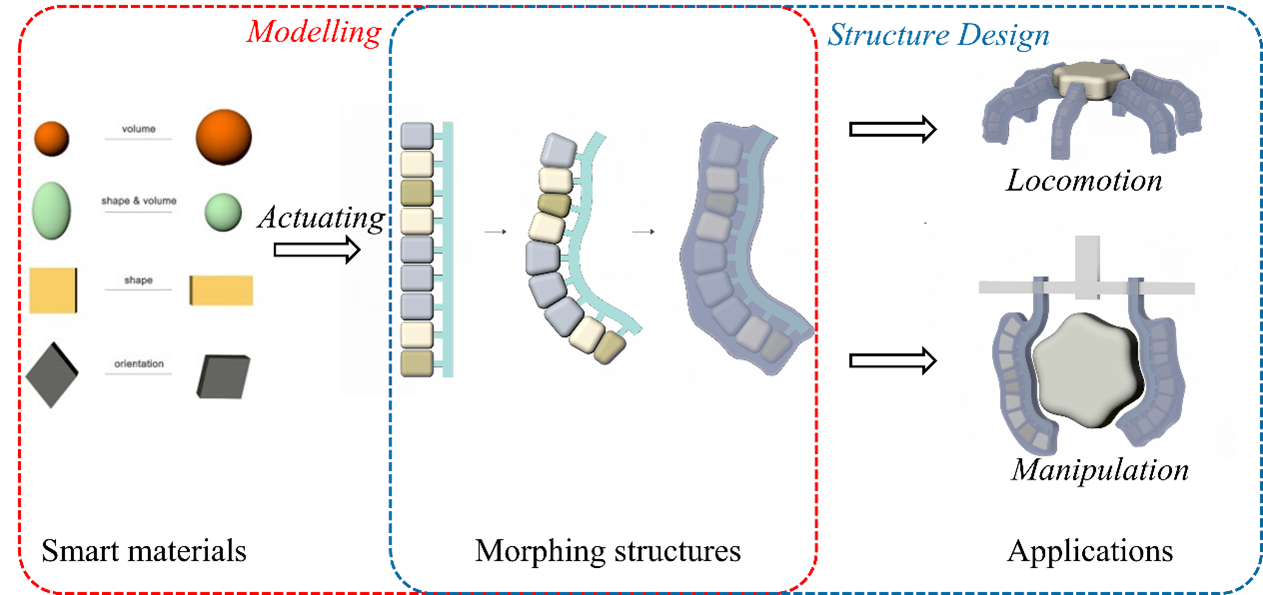
Mechanically intelligent structures design based on smart mechanism or smart materials
Nowadays, the application of soft robots has been explored on the small scale in many fields. Design of wearable bio-inspired medical devices, which can interact with the human body and adapt to unpredictable environments. In the bionic field, one typical example is underwater robot. However, there exists a noticeable scarcity of designs tailored specifically for deployment in marine, offshore, and port engineering.
This project aims to develop the mechanically intelligent structures based on the smart mechanism or smart materials which can be applied in the scenarios of the characteristic of flexibility, capacity, and adaptability. In this project, the comprehensive model based design methodology for the creation of mechanically intelligent structures is proposed for the applications in soft robotics. FEM models and a coupled FEM-DEM model are constructed to capture the nonlinear characteristics of smart materials and the intricate interactions between particles and soft body. Furthermore, this approach rooted in model-based design is applied across diverse scenarios, including underwater pipe manipulation, windmill blade installation, and seabed pipe maintenance. The design cases include the particle-based actuators capable of substantial deformation and high stiffness, hydrogel-based actuators enabling active deformation, and multiple smart material actuators fostering active deformation while enhancing adaptability.