I4Driving
I4Driving is an EU Horizon project in which the vision is to establish the foundation for a new industry-standard methodology to establish a credible and realistic human road safety baseline for the virtual assessment of Cooperative Connected and Automated Mobility (CCAM) systems. Due to the increasing coexistence of automated vehicles (AVs) and human-driven vehicles (HVs) on road networks, it is necessary for industry, policymakers, certification bodies, and testing organizations to have a robust prototype/tool, supported by strong scientific methodologies, for safety assessment of the automated driving systems (ADS).
The safety assessment of the ADS, however, requires empirical evidence on critical conditions and/or accidents that emerged from a heterogeneous and mixed traffic interaction. Since such data cannot be available before deployment, it is more practical to make this assessment in a virtual simulated environment. The credibility of such assessments, however, relies on how realistic the virtual environment is. In these virtual environments, vehicles are agents their behavior is simulated based on models calibrated on heterogeneous human driver behaviors. current driver models, so-called “traffic engineering models”, include car-following and lane-changing behavior of drivers that assume perfect human perception (of relevant stimuli), and optimal control (based on these stimuli). Thus, they inherently lack the capability of mimicking safety-critical driving behaviors and are therefore unsuitable to establish a credible human safety baseline in the prospective safety assessment of ADS.
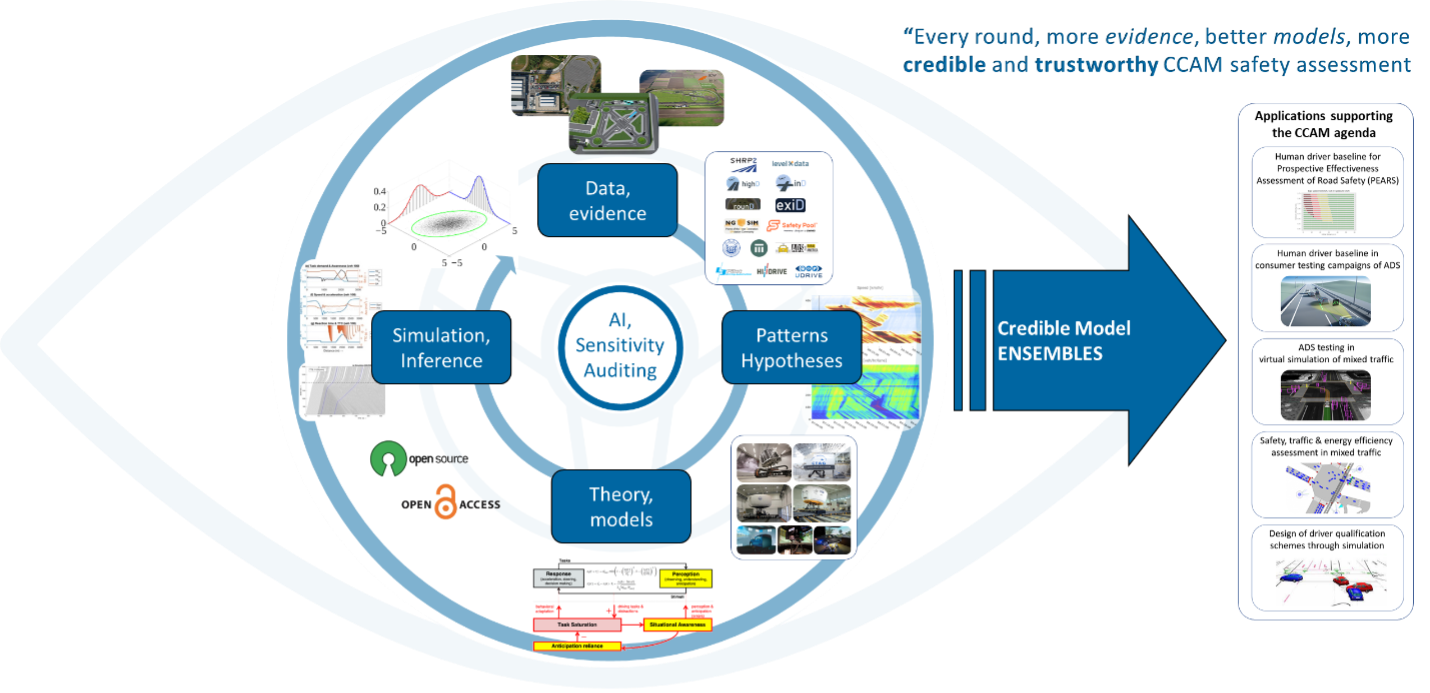
Therefore, The I4Driving project aims to deliver a new library of credible heterogeneous human driver models that incorporates more sophisticated human factors in mathematical formalism that enable us to simulate conditions under which, for instance, perception error, risk-taking, and distractions of simulated drivers lead to interaction between agents that result in critical traffic conditions and/or accidents. This library can explain and predict the heterogeneity and complexity of human driving behavior hence providing a trustworthy and realistic human road safety virtual assessment environment for CCAM.
The I4Driving model library makes sure to characterize input uncertainty while encoding driver heterogeneity into human driver models and also rigorously and ethically consider the trade-off between the complexity and relevancy of the delivered driver models through global sensitivity analysis and sensitivity auditing.
Look at the I4Driving website for more information about this project:
This research is led by Prof.dr. Hans van Lint. Other key contributors are: Dr.ir. Simeon C. Calvert, Dr.ir. Irene Martínez, Dr.ir. Wouter Schakel, Dr.ir. Ali Nadi, and PhD. candidate Mohammad Tamim Kashifi
DiTTLAB has international Partners in this project:

































