
ALBERO: Agile Landing on Branches for Environmental Robotics Operations
Early last month, the work from PhD candidate Liming Zheng and Assistant Professor Salua Hamaza was published in the journal of IEEE Robotics and Automation Letters.
Drones have become invaluable tools in environmental monitoring thanks to their agility and ability to cover vast areas in a single flight. However, technological constraints like the short battery life, as well as high noise levels, have limited their use for prolonged data gathering. Drawing inspiration from nature, particularly birds' perching behaviour, we introduce ALBERO, a framework for extending environmental monitoring missions in arboreal environments.
Challenges in Quadrotor Perching
While perching with drones has been a recurring theme in aerial robotics, existing solutions have limited their applicability to perching on (semi) horizontal tree branches or cylinders. These cases are not always representative of what's present in the forest - where real tree branches tend to grow towards the light and therefore present a high inclination. Current mechanical solutions fall short to tackle dynamic perching and take-off on inclined branches.

Implications of ALBERO for Environmental Monitoring
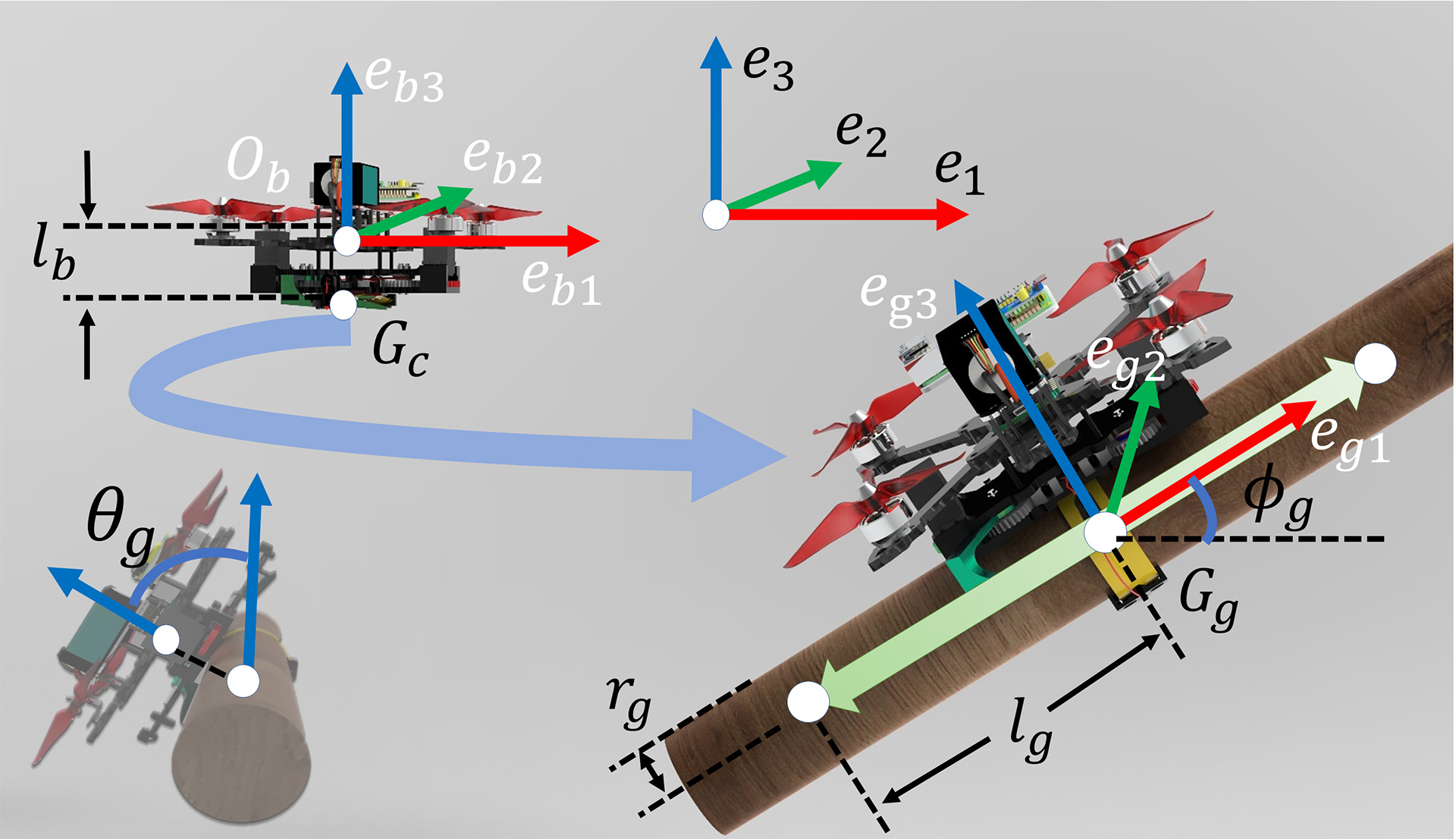
ALBERO aims at solving the challenge of dynamic quadrotor perching on inclined tree branches. It combines a mechatronic solution with an ultra-fast grasping mechanism (grasp + release) and a dedicated control module for agile perching. This combination enables drones to land swiftly and securely on steeply-inclined tree branches, thereby extending monitoring missions in the forest and enabling quiet data collection.
Read the article: https://doi.org/10.1109/LRA.2024.3349914