BioMorphic Intelligence Lab
Biologically inspired solutions for aerial robotics
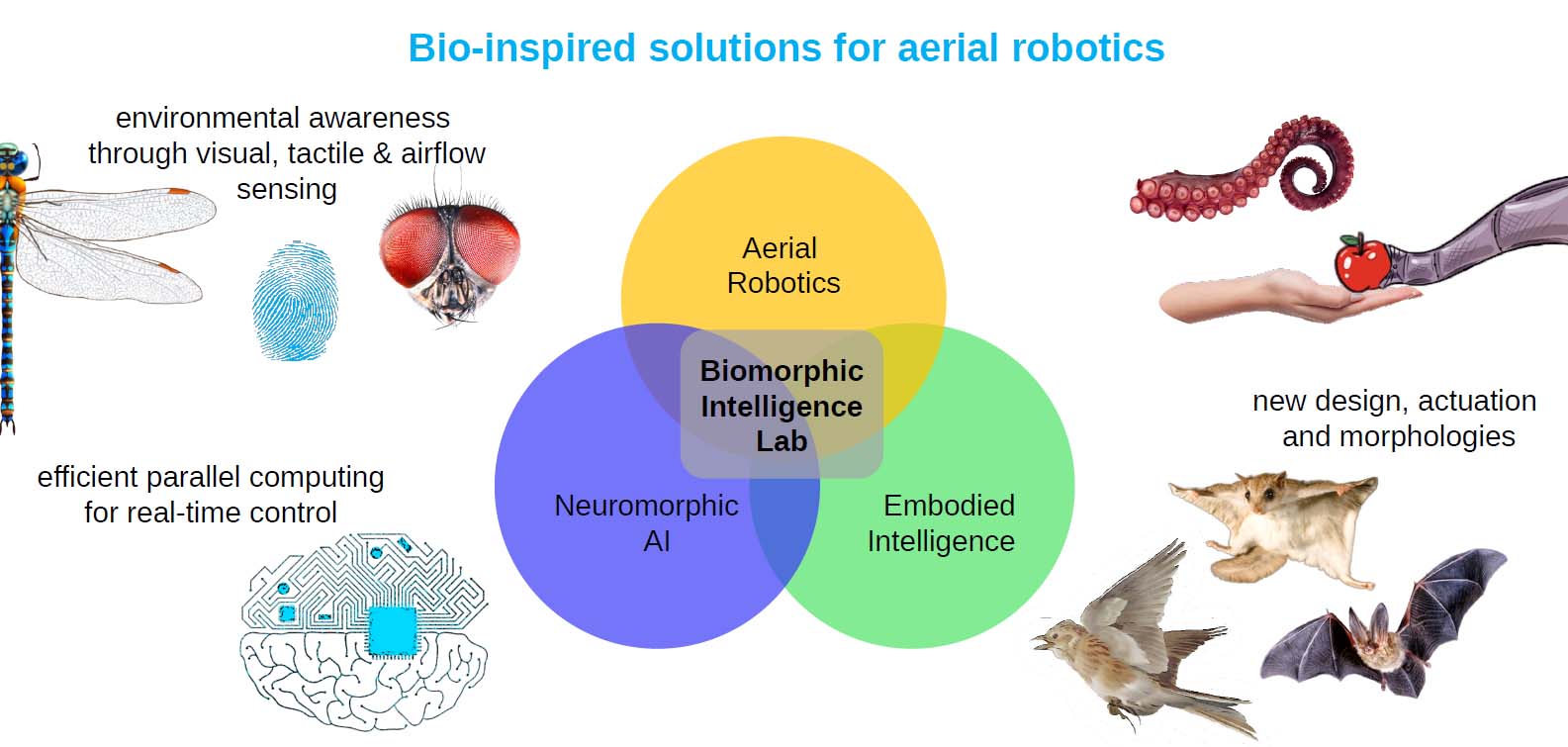
Aerial robots are now ubiquitous. Thanks to their nimbleness, manoeuvrability, and affordability, drones are used in many sectors to monitor, map, and inspect. As a next step, flying robots offer more when interacting with their surroundings via anthropomorphic-like manipulation capabilities. Some overarching challenges remain for this new class of aerial robots, and solutions inspired by biology can be implemented across three key areas for robot performance: sensing their environment, processing this information, and acting upon the results.
SENSE
Bio-inspired perception (e.g., visual or tactile feedback) can provide the drone with information on its environment, mimicking animals’ sensory feedback. Using retina-like event cameras, drones can avoid obstacles and detect objects at a fraction of the power and latency of conventional hardware and algorithms. Enhancing tactile feedback can also prompt different behaviors in response to different force stimuli.
THINK
Bio-inspired, brain-like models from Neuromorphic AI can help lower the computational load and speed up sensory data processing for navigation. This boosts real-time control and autonomy. Compliance embedded in the control of the robot also favors safe and robust interaction with unknown environments and targets.
ACT
Bio-inspired design and materials make the drone's body fit for interaction with unknown objects and enable a safe response to external disturbances. Robot morphology can be inspired by flying animals’ shape, configuration, and materials. Together, these features create embodied intelligence and can partially offset the behavior complexity handled by the brain.
The BioMorphic Intelligence Lab aims to tackle robustness and efficiency challenges for interacting drones, using biologically inspired solutions for both the 'body' and the 'brain' and applying embodied intelligence and neuromorphic AI techniques.
The BioMorphic Intelligence Lab is part of the TU Delft AI Labs programme.

Collection of training data is an integral part of modern AI research. A helmet mounted with two retina-inspired event cameras can be used to mimic the egocentric, stereo vision of mammals, and the recorded videos can be used for biologically-inspired machine learning.

If we gave drones human-like fingers, they would be able to help humans in difficult situations at height. By embodying the sense of touch, drones can feel the environment in the same tactile way as humans, in the absence of light.

In nature, animals use their limbs for grasping and walking. By imitating biological functions, drones with lightweight limbs can better cope with impacts but also use their limbs for locomotion. This way, drones will become flexible to operate in different environments.



The Team
Directors

Salua Hamaza
Faculty of AE
Lab director

Nergis Tömen
Faculty of EEMCS
Lab director
Post Docs

Dimitris Chaikalis
Post Doc









Associated faculty

Dr Cosimo Della Santina
Associated faculty

Dr Kunal Masania
Associated faculty

Prof. Dr. Guido de Croon
Associated faculty

Dr. Jan van Gemert
Associated faculty
Education
Courses
2024/2025
- Physical Interaction for Aerial and Space Robots | AE4324
- Fundamentals of AI | IFEEMCS520100
- Data Mining | CSE2525
- Joint interdisciplinary project | TUD4040
- Capstone Applied AI Project | TI3150TU
- RO Msc Thesis | RO57035
- Research Project | CSE3000
- Computer Science program | IN5000
- Bio-inspired Intelligence and learning for Aerospace Applications | AE4350
Master projects
Open for master thesis
Ongoing
- Autonomous Forest Canopy Exploration, Salua Hamaza, Rita Santos (2023/2024)
- Design of an Inherently Balanced Aerial Manipulator, Salua Hamaza, Michele Bianconi (2023/2024)
- Autonomous Quadrotor Perching, Salua Hamaza, Georg Strunck (2023/2024)
- Time steps in spiking neural networks, Nergis Tomen, Alex de Los Santos Subirats (2023/2024)
- Self-organized criticality in spiking networks of non-leaky integrator neurons, Nergis Tomen, Luca Frattini (2023/2024)
- NeuroBench: Benchmarking spiking and analog neural networks for primate tracking sata, Nergis Tomen, Paul Hueber (2022/2023)
Finished
- Design of an inherently fully dynamically balanced aerial manipulator with omnidirectional workspace, Alexander Bom (2024)
- Towards a Robust Wireless Real-Time Ecological Monitoring System, Luke de Waal (2024)
- A lightweight quadrotor autonomy system, Andreas Zwanenburg (2024)
- Aerial Perching via Active Touch: Embodying Robust Tactile Grasping on Aerial Robots, Anish Jadoenathmisier (2023)
- Automated Aerial Screwing with a Fully Actuated Aerial Manipulator, Salua Hamaza, Paul Reck (2022/2023)
- Vision-based Quadrotor Perching on Tree Branches, Salua Hamaza, Seamus McGinley (2022/2023)
- Simple Online Visual Object Tracker Fusion based on Distributed Kalman Filtering, Nergis Tomen, Yigen Zhong (2022/2023)
- Optimizing Event-Based Vision by Realizing Super-Resolution in Event-Space: an Experimental Approach, Nergis Tomen, Mahir Sabanoglu (2022/2023)
- Optical Flow Upsamplers Ignore Details: Neighborhood Attention Transformers for Convex Upsampling, Nergis Tomen, Sander Gielisse (2022/2023)
- Making It Clear Using Vision Transformers in Multi-View Stereo on Specular and Transparent Materials, Nergis Tomen, Pieter Tolsma (2022/2023)
- Battle the Wind: Improving Flight Stability of a Flapping Wing Micro Air Vehicle under Wind Disturbance, Salua Hamaza, Sunyi Wang (2021/2022)
- ADAPT: A 3 Degrees of Freedom Reconfigurable Force Balanced Parallel Manipulator for Aerial Applications, Salua Hamaza, Kartik Suryavansi (2021/2022)
- Sensorless Impedance Control for Curved Surface Inspections Using the Omni-Drone Aerial Manipulator, Salua Hamaza, Hani Abu-Jurji (2021/2022)
- Embodied airflow sensing for improved in-gust flight of flapping wing MAVs, Salua Hamaza, Chenyao Wang (2021/2022)
- A Centralised Approach to Aerial Manipulation on Overhanging Surfaces, Salua Hamaza, Martijn Brummelhuis (2020/2021)
Partners