
"At the TU Delft we cooperate with various departments to develop an integrated solution for handling organic objects"
The Netherlands is the second biggest exporter of agro-food products worldwide. However, skilled manual labourers are harder to find in the food industry. The work must happen hygienic, efficient and sustainable under harsh conditions, for example in refrigerated rooms. Robotics could provide a solution to the shortage of labour. In FlexCRAFT, the TU Delft collaborates with 4 other Dutch universities, WUR, TUe, UT and UvA, to improve the functioning of robotics in the agrifood sector.
In industry, most robots are placed in a more or less static environment where it can execute a pre-programmed set of motions. Take for example a car factory, where the cars appear on the same place and the robot can execute the same motion for every car. Robots in the agriculture, however, have to deal with a dynamic environment. Each cucumber that has to be picked will look slightly different and always be at a different spot. In addition, the robot may encounter other robots or even humans in greenhouses. The problem for implementing robotics in agriculture is how to deal with variations in the object, environments, and tasks.
Once in the three months we have an integration meeting with the other universities to discuss the integration of the subsolutions.
Ad Huisjes
Sense-think-act
To cope with the irregularities of a dynamic environment, robots are programmed with a sense-think-act loop. First, they perceive or “sense” their surroundings. Then they'll think. Based on pre-programmed functions and constraints, the robot decides what it will do next and how it will do it. Finally, it will act, i.e., execute the movement it has planned. This approach, however, cannot deal with the challenges that the agro-food environment poses, as perception and action are tightly coupled through the interactions of the robot with the environment.
Use cases
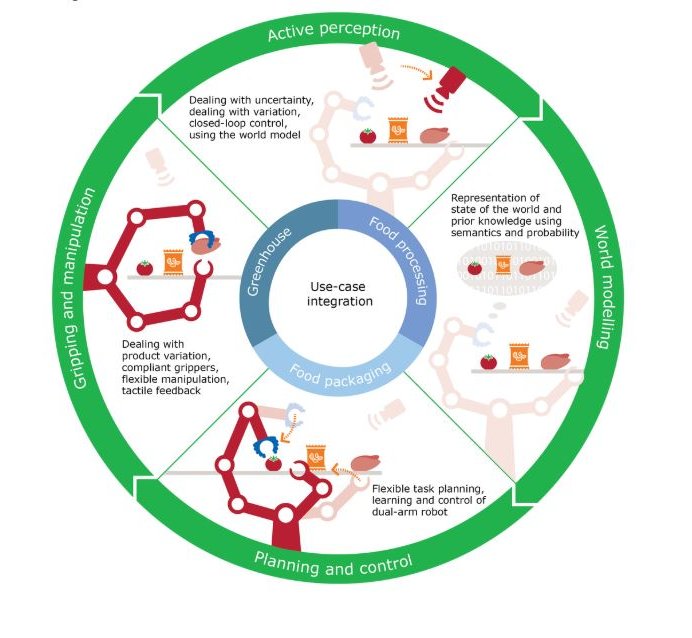
The FlexCRAFT program focuses on three use-cases; food-production, food-processing and food-packaging. In food-production, robotics for example addresses the removal of leaves and harvesting fruits in greenhouses. The emphasis is placed on sensing, as the surrounding is far from optimal for robotics. This is because of changes in illumination and humidity, and the problem of other objects being in front of the goal. In food-processing the robots have to, for example, bi-manually cut or remove selected parts of the chicken products and position the products in the densely arranged packages. In this case, emphasis is placed on acting. The variation in shape and size of objects makes it difficult to come up with a universal solution. In food-packing, robotics could be used to pack a variety of food products like bags of chips and packs of cookies. The emphasis of is placed on thinking. The products lay in random poses in containers and must be placed in a certain orientation in their container, possibly using multiple arms. A final challenge is gripping objects that are deformable and have natural variations.
FlexCRAFT
As can be seen in the image, there are four research-lines. The TU Delft is involved in two, namely Planning & Control and Gripping & Manipulation. The two departments working on these projects work closely together. The TU Delft focuses on developing an integrated solution to grasp biological objects, tells Ad Huisjes. He works for his PhD research on the development of the gripper. The TU Delft is especially looking at a comprehensive solution. Problems can sometimes better be handled by changing the software of the robot, and sometimes it is easier to look at the hardware, like the gripper.
Planning & control
There are two ways to teach a robot to deal with their dynamic environment. In the conventional way, humans program functions and constraints. This approach is challenging for scenarios that exhibit large variations. Food packaging and processing frequently require the usage of two robot arms for packaging food. The two arms have twice as many joints, which means heavier workload and complicated functions.
Another strategy is ‘learning from experience’ and ‘learning from observation’. With the first strategy the robot will learn like any child does, it tries something and evaluates the outcome. If it encounters a strawberry, it will recall its earlier encounters and acts the way it found to best manipulate a strawberry. With the second strategy the robot gains insights on how to solve a task by observing how a human teacher does it.
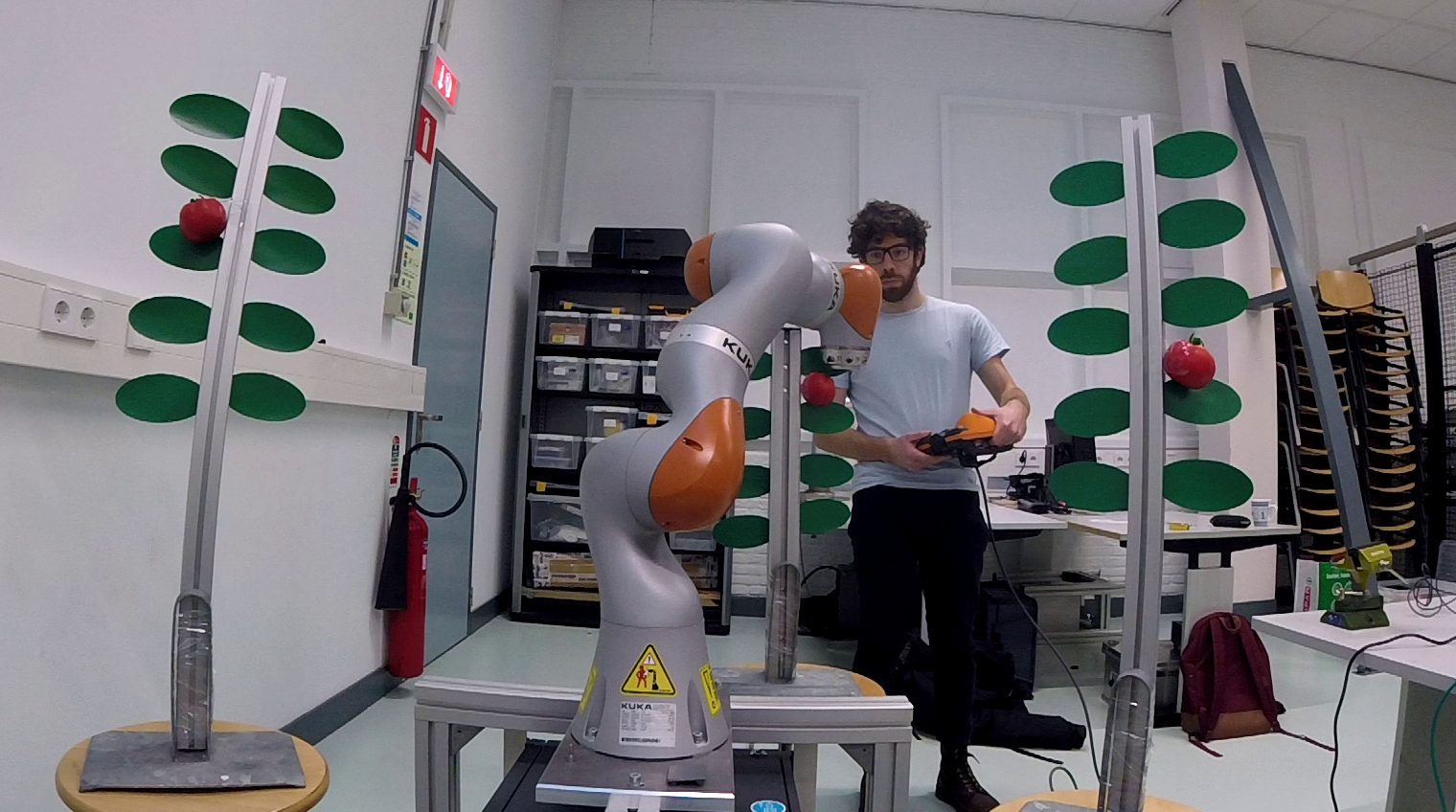
Experimental setup
Gripping & Manipulation
With current robotics we are now able to grab solid, defined objects. The use of robotics in the three use-cases lead to difficult situations as it requires the handling of organic products, which introduces specific challenges. The objects are of all forms, sizes and softnesses. To handle these irregularities the TU Delft works on compliant grippers which are underactuated. These grippers automatically form themselves around the goal object and work in a hygenic way. This way they can have a firm grip without putting too much pressure on the biological products.
The other research-lines are focussing on perception. This is done by the other universities contributing to the project. Huisjes: "We are closely cooperating with the other universities. Once in the 3 months we have an integration meeting. We discuss how our solutions can be combined and reflect on the work done."