Gekleurd 3D printen helpt robot zijn eigen vingers zien
Door de opkomst van kunstmatige intelligentie en robotica zoeken designers en onderzoekers naar manieren om robots veiliger en flexibeler te maken. Denk aan robots die in direct contact staan met mensen, zoals zorgrobots. Of robots die met breekbare of gevoelige spullen werken, zoals grijpers voor fruit en groenten.
Nu komen we bij het probleem: dit soort interactie is onvoorspelbaar, dus robots moeten de positie van hun eigen vingers en lichaam kunnen voelen. Onderzoekers bij de faculteit Industrieel Ontwerpen van TU Delft hebben een manier ontwikkeld voor robots om hun eigen vingers te ‘zien’. Hierbij maken ze gebruik van multicolour 3D printen en soft robotics.
Hun onderzoek, getiteld ‘Color-based Proprioception of Soft Actuators Interacting with Objects’ is onlangs gepubliceerd in IEEE/ASME Transactions on Mechatronics.

Kleur voor robots met zelfdetectie
Multicolour 3D printen wordt vaak gebruikt om realistische modellen te maken, of zelfs schilderijen van oude meesters te reproduceren. IO onderzoeker Rob Scharff: “Nieuw onderzoek toont aan dat deze technologie verder ingezet kan worden dan esthetische toepassingen. We kunnen dit gebruiken om patronen van meerdere kleuren te maken voor robots met zelfdetectie. Deze kleurpatronen in het lichaam van een robot vertalen vervorming van de zachte gedeeltes van een robot in een verandering van kleur. Dit kan dan opgepikt worden door kleine kleursensoren in het lichaam. Informatie over deze vorm van een zacht robotdeel kan uit die sensordata gehaald worden: De robot ‘ziet’ de vorm van zijn eigen vinger en kan direct aanpassingen doen”
De nauwkeurigheid waarmee robots vormen kunnen detecteren is met hulp van deze kleurpatronen vele malen hoger dan andere detectiemethodes. Deze video laat zien hoe nauwkeurig vormdetectie behaald kan worden, zelfs als de zachte aandrijving de interactie aangaat met onbekende objecten. Nauwkeurige zelfdetectie voor robots wordt gezien als een grote stap richting volledig zelfstandige controle voor zachte robots.
Zachte robots
Waarom hebben we kleurpatronen nodig, waarom kunnen we niet gewoon traditionele sensoren gebruiken in robots gemaakt van zachter materiaal? “Traditionele robots hebben meestal gewrichten die rondom één as kunnen draaien. Om de positie van deze robots te bepalen, heb je dus maar één encoder per gewricht nodig. Maar zachte robots kunnen juist tegelijkertijd buigen, draaien en strekken, daarvoor kunnen we de huidige sensoren niet gebruiken”, verteld Scharff. “Denk bijvoorbeeld aan de slurf van een olifant, deze kan een hele complexe vorm aannemen die niet met een paar gemeten hoeken te beschrijven is. We hebben dus voor zachte robots sensoren nodig die een grote variatie aan vervormingen kunnen vastleggen. Daarnaast moeten de sensoren flexibel zijn, zodat ze de bewegingen van de zachte robot niet hinderen.”

Kleurpositie
De onderzoekers kalibreerden de sensoren met gebruik van een feedforward neural network. Om dit netwerk te trainen gebruikten ze 1000 voorbeelden van sensorwaardes met corresponderende ‘vingervormen’. Deze vormen van de vingers werden gerepresenteerd door 6 markers op de niet-verlengbare laag, die werden opgenomen met een camera. De input voor het netwerk waren de uitlezingen van 4 kleursensoren met ieder 4 kanalen (rood, groen, blauw, wit).
Scharff: “Onze methode is in staat om de positie van elk van deze markers te voorspellen, met een meetfout die over het algemeen tussen de 0,025 en 0,075 mm ligt. Onze methode presteert ook goed bij gevallen van belasting van de hand die niet in de trainingsdata voorkwamen. In tegenstelling tot bestaande sensoren, kunnen wij de exacte vorm meten van hoe een grijper om een object zit. Daarom geloven wij dat dit een grote stap is richting nauwkeurig objecten kunnen grijpen en bewegen met robots van zacht materiaal.”
In beweging komen
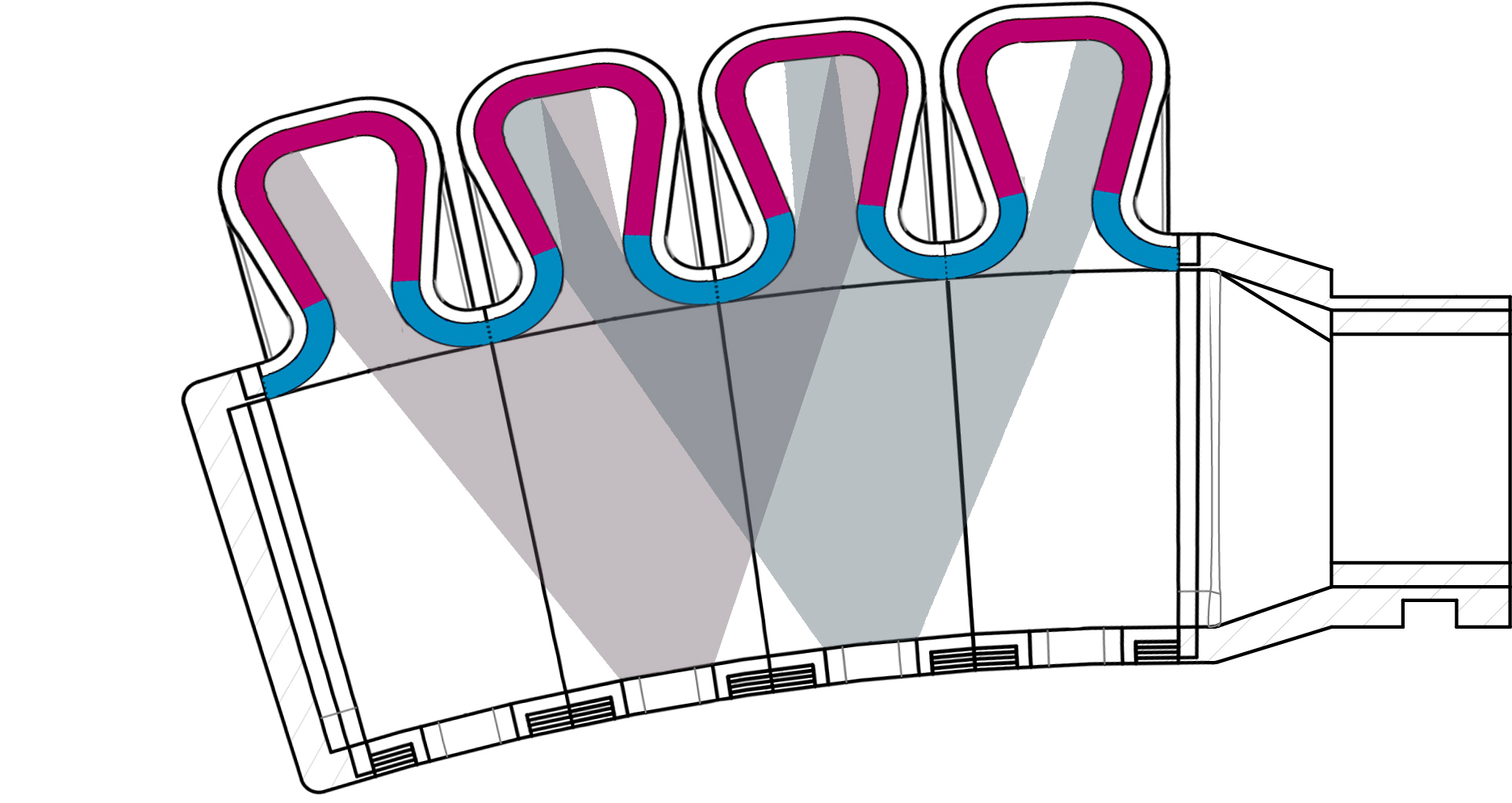
De zachte robot vingers worden 3D geprint met een PolyJet multimaterial printer. De blaasbalgen zijn gemaakt met het flexibele Agilus Black materiaal, terwijl de gekleurde structuren bestaan uit afwisselende segmenten van VeroCyan en VeroMagenta. De speciaal vervaardigde sensoren zijn verwerkt op kleine 3D geprinte plugs die in de bodem van de vingers geplaatst worden voor een luchtdichte sluiting. “Kleursensoren zijn goedkoop en gemakkelijk te verkrijgen. Daarom is het ook simpeler om deze techniek in andere zachte robots te verwerken”, concludeert Scharff.
De auteurs van dit artikel zijn: Rob Scharff (TU Delft), Rens Doornbusch (project MARCH), Zjenja Doubrovski (TU Delft), Jun Wu (TU Delft), Jo Geraedts (TU Delft) and Charlie Wang (The Chinese University of Hong Kong)

Jo Geraedts
"Things should be made as simple as possible, but not any simpler.” - Albert Einstein

Jun Wu
- +31 (0)15 27 84858
- j.wu-1@tudelft.nl
- Personal webpage
-
Room 32-B-3-030
"Make things as simple as possible, but not simpler." - Albert Einstein

Zjenja Doubrovski
- +31 (0)15 278 63 67
- e.l.doubrovski@tudelft.nl
-
Room B-3-030